
The Ingredients of Real World Robotic Reinforcement Learning
Blog post describing experiments on applying #RL in real world.
Blog post: https://bair.berkeley.edu/blog/2020/04/27/ingredients/
Paper: https://openreview.net/forum?id=rJe2syrtvS
#DL #robotics
Blog post describing experiments on applying #RL in real world.
Blog post: https://bair.berkeley.edu/blog/2020/04/27/ingredients/
Paper: https://openreview.net/forum?id=rJe2syrtvS
#DL #robotics
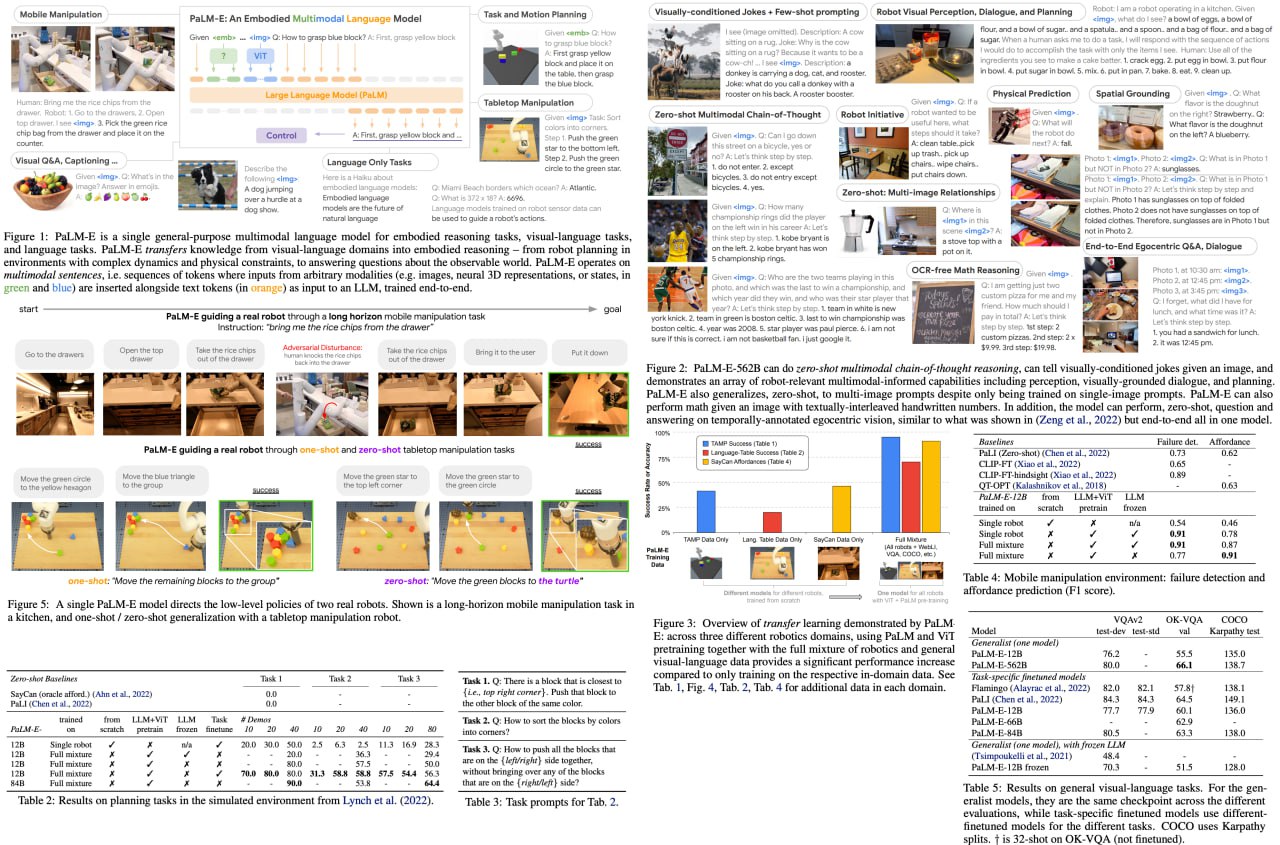
PaLM-E: An Embodied Multimodal Language Model
In this paper, the authors introduce the concept of "embodied language models," which integrate real-world sensory information with language processing. This integration enables the models to perform tasks related to robotics and perception seamlessly.
To achieve this, the models are trained end-to-end using a large language model and multiple sensory inputs, including visual and textual information. These models can tackle complex tasks such as sequential robotic manipulation planning, visual question answering, and captioning. The results of evaluations demonstrate the effectiveness of this approach, including positive transfer across different domains.
The flagship model, PaLM-E-562B, is the crown jewel of this research. It excels in robotics tasks and delivers state-of-the-art performance on OK-VQA. Despite its specialization in robotics, this model maintains its generalist language capabilities.
Paper: https://arxiv.org/abs/2303.03378
Project link: https://palm-e.github.io/
A detailed unofficial overview of the paper: https://andlukyane.com/blog/paper-review-palme
#deeplearning #nlp #transformer #sota #languagemodel #robotics
In this paper, the authors introduce the concept of "embodied language models," which integrate real-world sensory information with language processing. This integration enables the models to perform tasks related to robotics and perception seamlessly.
To achieve this, the models are trained end-to-end using a large language model and multiple sensory inputs, including visual and textual information. These models can tackle complex tasks such as sequential robotic manipulation planning, visual question answering, and captioning. The results of evaluations demonstrate the effectiveness of this approach, including positive transfer across different domains.
The flagship model, PaLM-E-562B, is the crown jewel of this research. It excels in robotics tasks and delivers state-of-the-art performance on OK-VQA. Despite its specialization in robotics, this model maintains its generalist language capabilities.
Paper: https://arxiv.org/abs/2303.03378
Project link: https://palm-e.github.io/
A detailed unofficial overview of the paper: https://andlukyane.com/blog/paper-review-palme
#deeplearning #nlp #transformer #sota #languagemodel #robotics
{kind=link}