
Two papers stating random architecture search is a competitive (in some cases superior) baseline for NAS methods.
These are papers demonstrating that Neural Architecture Search can be stohastic.
Paper 1: https://arxiv.org/abs/1902.08142
Paper 2: https://arxiv.org/abs/1902.07638
#NAS #nn #DL
These are papers demonstrating that Neural Architecture Search can be stohastic.
Paper 1: https://arxiv.org/abs/1902.08142
Paper 2: https://arxiv.org/abs/1902.07638
#NAS #nn #DL
arXiv.org
Evaluating the Search Phase of Neural Architecture Search
Neural Architecture Search (NAS) aims to facilitate the design of deep networks for new tasks. Existing techniques rely on two stages: searching over the architecture space and validating the best...
SpineNet: Learning Scale-Permuted Backbone for Recognition and Localization
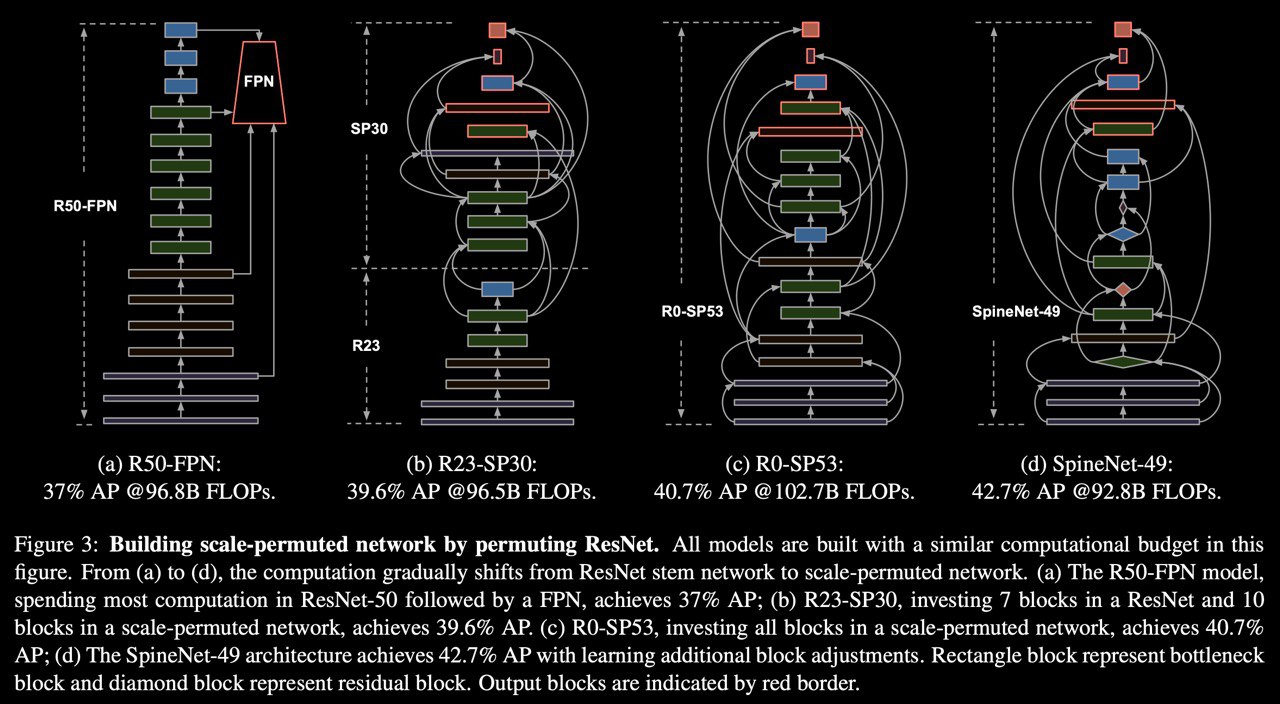
Abstract: CNN typically encodes an input image into a series of intermediate features with decreasing resolutions. While this structure is suited to classification tasks, it does not perform well for tasks requiring simultaneous recognition and localization (e.g., object detection). The encoder-decoder architectures are proposed to resolve this by applying a decoder network onto a backbone model designed for classification tasks. In this paper, we argue that encoder-decoder architecture is ineffective in generating strong multi-scale features because of the scale-decreased backbone. We propose SpineNet, a backbone with scale-permuted intermediate features and cross-scale connections that are learned on an object detection task by Neural Architecture Search. SpineNet achieves the SOTA performance of a one-stage object detector on COCO with 60% less computation and outperforms ResNet-FPN counterparts by 6% AP. SpineNet architecture can transfer to classification tasks, achieving 6% top-1 accuracy improvement on a challenging iNaturalist fine-grained dataset.
So, by Google's beloved method of creating a new SOTA, there is a new one! They just permute ResNet layers by NAS with adding resample cross-scale connections for correct connection scales output between layers. It seems that no need FPN cause the whole backbone is FPN. They train from scratch on RetinaNet just replace ResNet backbone with SpineNet and get SOTA. On two-stage detectors, there is the same result by replacing the backbone with SpineNet. If you want just classify something with that backbone it is performed very well too. So new architecture for any application!
Good job.
paper: https://arxiv.org/abs/1912.05027
code: Very wanted, but not release yet
#CV #ObjectDetection #GoogleResearch #NAS #SOTA
Abstract: CNN typically encodes an input image into a series of intermediate features with decreasing resolutions. While this structure is suited to classification tasks, it does not perform well for tasks requiring simultaneous recognition and localization (e.g., object detection). The encoder-decoder architectures are proposed to resolve this by applying a decoder network onto a backbone model designed for classification tasks. In this paper, we argue that encoder-decoder architecture is ineffective in generating strong multi-scale features because of the scale-decreased backbone. We propose SpineNet, a backbone with scale-permuted intermediate features and cross-scale connections that are learned on an object detection task by Neural Architecture Search. SpineNet achieves the SOTA performance of a one-stage object detector on COCO with 60% less computation and outperforms ResNet-FPN counterparts by 6% AP. SpineNet architecture can transfer to classification tasks, achieving 6% top-1 accuracy improvement on a challenging iNaturalist fine-grained dataset.
So, by Google's beloved method of creating a new SOTA, there is a new one! They just permute ResNet layers by NAS with adding resample cross-scale connections for correct connection scales output between layers. It seems that no need FPN cause the whole backbone is FPN. They train from scratch on RetinaNet just replace ResNet backbone with SpineNet and get SOTA. On two-stage detectors, there is the same result by replacing the backbone with SpineNet. If you want just classify something with that backbone it is performed very well too. So new architecture for any application!
Good job.
paper: https://arxiv.org/abs/1912.05027
code: Very wanted, but not release yet
#CV #ObjectDetection #GoogleResearch #NAS #SOTA
{kind=link}
EfficientNetV2: Smaller Models and Faster Training
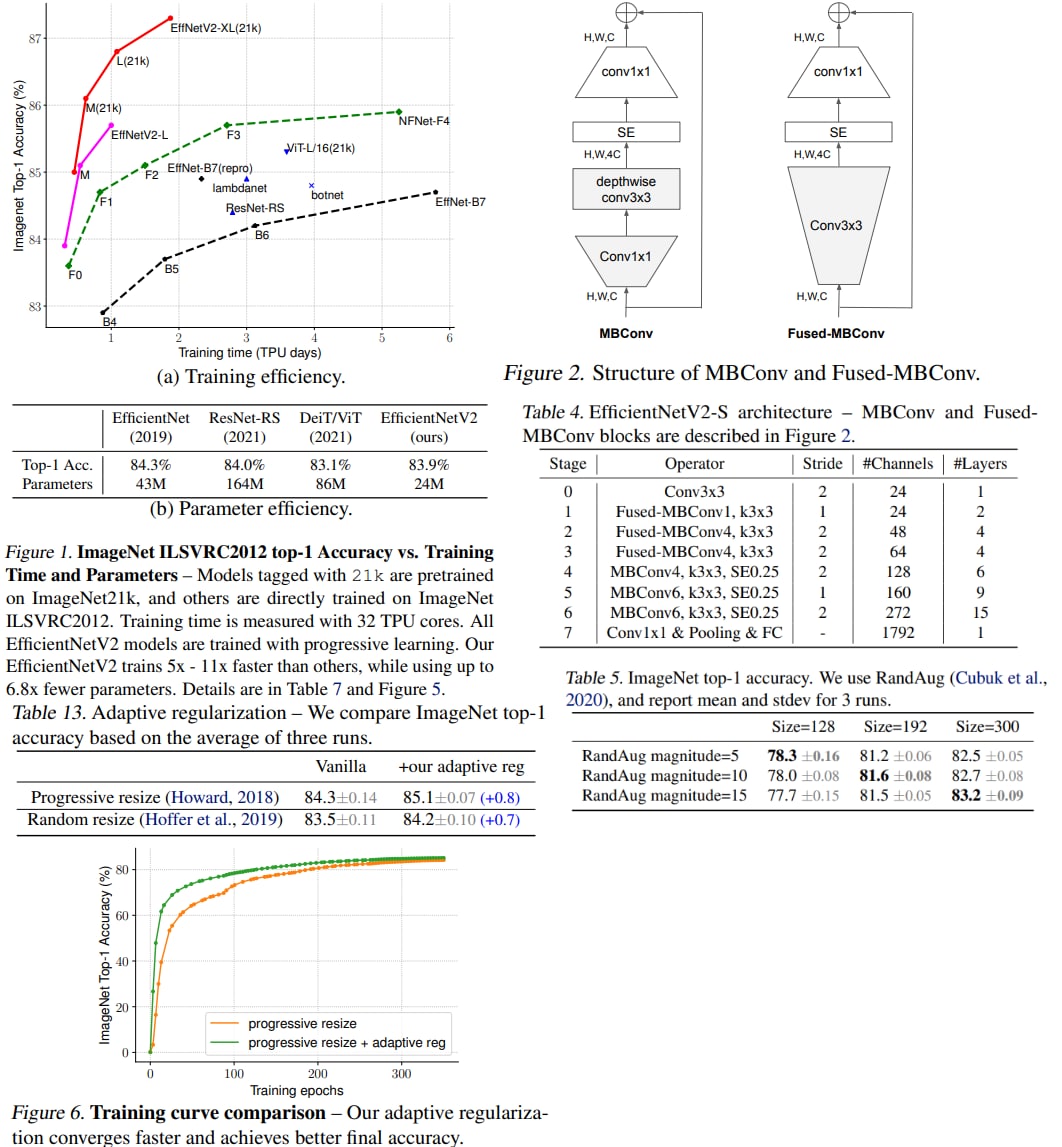
A new paper from Google Brain with a new SOTA architecture called EfficientNetV2. The authors develop a new family of CNN models that are optimized both for accuracy and training speed. The main improvements are:
- an improved training-aware neural architecture search with new building blocks and ideas to jointly optimize training speed and parameter efficiency;
- a new approach to progressive learning that adjusts regularization along with the image size;
As a result, the new approach can reach SOTA results while training faster (up to 11x) and smaller (up to 6.8x).
Paper: https://arxiv.org/abs/2104.00298
Code will be available here:
https://github.com/google/automl/tree/master/efficientnetv2
A detailed unofficial overview of the paper: https://andlukyane.com/blog/paper-review-effnetv2
#cv #sota #nas #deeplearning
A new paper from Google Brain with a new SOTA architecture called EfficientNetV2. The authors develop a new family of CNN models that are optimized both for accuracy and training speed. The main improvements are:
- an improved training-aware neural architecture search with new building blocks and ideas to jointly optimize training speed and parameter efficiency;
- a new approach to progressive learning that adjusts regularization along with the image size;
As a result, the new approach can reach SOTA results while training faster (up to 11x) and smaller (up to 6.8x).
Paper: https://arxiv.org/abs/2104.00298
Code will be available here:
https://github.com/google/automl/tree/master/efficientnetv2
A detailed unofficial overview of the paper: https://andlukyane.com/blog/paper-review-effnetv2
#cv #sota #nas #deeplearning
{kind=link}