
РОБОТИЗАЦИЯ – КАКАЯ ОНА НА САМОМ ДЕЛЕ
Как это делается в медиа, писать не нужно. Все и так знают: от маркетингового хайпа и зашкаливающего робо-оптимизма до алармизма типа «массовой безработицы» и «восстания роботов».
Как это выглядит на самом деле, - источников раз-два и обчелся. Например, отчет McKinsey «A FUTURE THAT WORKS: AUTOMATION, EMPLOYMENT, AND PRODUCTIVITY» (полная 140 стр версия и бриф 20 стр. есть здесь).
Самое важное, имхо, следующее.
1. Все, как обычно, упирается в деньги и рост производительности.
Деньги – это примерно половина от $16 трлн., выплачиваемых в виде зарплат, которые можно сэкономить, автоматизировав деятельность людей.
Рост производительности – это то, без чего не растет ВВП на душу населения (да и любой бизнес).
Этот рост возможен за счет (1) роста занятости и (2) роста автоматизации.
2. Проанализировав 2 тыс. типов трудовых активностей для 800 профессий, становится ясно, что только роботами и совсем без людей не обойтись почти нигде:
— полностью автоматизировать можно лишь < 5% профессий (которые почти все уже автоматизированы!);
— но в 60% профессий можно автоматизировать 30%+ активностей;
— самые автоматизируемые активности – это:
✔️ сбор данных - можно автоматизировать 64% активностей;
✔️ обработка данных - 69%;
✔️ регламентированные механические действия (типа сварка, пайка, резка, сортировка …) – 81%
N.B. 1) Каждая из трудовых активностей требует различных сочетаний 18 умений: от умения передвигаться и ориентироваться до креативности, умения планировать, оптимизировать и координировать других.
2) В разных странах и индустриях потенциалы автоматизации сильно разнятся (см. инфографику)
3. Никакая массовая безработица не грозит. Наоборот – грозит дефицит людей. Без увеличения занятости (!), по крайней мере в ближайшие 50 лет, невозможно обеспечить планируемый рост ВВП на душу населения. Автоматизация может дать годовую прибавку в 0,8-1.4% ВВП в год. А нужно 2.8%!
При этом обязательно нужно в корне менять обучение и переобучение. Как это делать, пока никто не знает. Но это нужно придумать позарез. Ау, стартапы!
#Роботы #CценарииБудущего
Поразительно, насколько не совпадают подход и логика обсуждения темы роботизации в медиа и у профессиональных консультантов.Как это делается в медиа, писать не нужно. Все и так знают: от маркетингового хайпа и зашкаливающего робо-оптимизма до алармизма типа «массовой безработицы» и «восстания роботов».
Как это выглядит на самом деле, - источников раз-два и обчелся. Например, отчет McKinsey «A FUTURE THAT WORKS: AUTOMATION, EMPLOYMENT, AND PRODUCTIVITY» (полная 140 стр версия и бриф 20 стр. есть здесь).
Самое важное, имхо, следующее.
1. Все, как обычно, упирается в деньги и рост производительности.
Деньги – это примерно половина от $16 трлн., выплачиваемых в виде зарплат, которые можно сэкономить, автоматизировав деятельность людей.
Рост производительности – это то, без чего не растет ВВП на душу населения (да и любой бизнес).
Этот рост возможен за счет (1) роста занятости и (2) роста автоматизации.
2. Проанализировав 2 тыс. типов трудовых активностей для 800 профессий, становится ясно, что только роботами и совсем без людей не обойтись почти нигде:
— полностью автоматизировать можно лишь < 5% профессий (которые почти все уже автоматизированы!);
— но в 60% профессий можно автоматизировать 30%+ активностей;
— самые автоматизируемые активности – это:
✔️ сбор данных - можно автоматизировать 64% активностей;
✔️ обработка данных - 69%;
✔️ регламентированные механические действия (типа сварка, пайка, резка, сортировка …) – 81%
N.B. 1) Каждая из трудовых активностей требует различных сочетаний 18 умений: от умения передвигаться и ориентироваться до креативности, умения планировать, оптимизировать и координировать других.
2) В разных странах и индустриях потенциалы автоматизации сильно разнятся (см. инфографику)
3. Никакая массовая безработица не грозит. Наоборот – грозит дефицит людей. Без увеличения занятости (!), по крайней мере в ближайшие 50 лет, невозможно обеспечить планируемый рост ВВП на душу населения. Автоматизация может дать годовую прибавку в 0,8-1.4% ВВП в год. А нужно 2.8%!
При этом обязательно нужно в корне менять обучение и переобучение. Как это делать, пока никто не знает. Но это нужно придумать позарез. Ау, стартапы!
#Роботы #CценарииБудущего
McKinsey & Company
Harnessing automation for a future that works
Automation is happening, and it will bring substantial benefits to businesses and economies worldwide, but it won’t arrive overnight. A new McKinsey Global Institute report finds realizing automation’s full potential requires people and technology to work…
РОБОТИЗАЦИЯ – КАКАЯ ОНА НА САМОМ ДЕЛЕ (ПРИМЕР)
Недавно я писал о том, что из себя представляет роботизация на самом деле. Оказалось, что это мало похоже на то, что пишут на эту тему вендоры, исследователи и журналисты.
Теперь, в продолжение темы, хочу привести хороший пример – анализ состояния роботизации в конкретной стране – Дании. Такой пример ценен вдвойне:
1) Это анализ хороших бизнес-консультантов (McKinsey).
2) Большинство анализов дает обобщенные цифры по миру или континентам (что сильно смазывает картину). Если же приводят страну, так обычно это США, довольно сильно оторвавшаяся в данном вопросе от большинства стран, или Китай, где все вообще сильно по-своему. Ну а Дания, в этом смысле, - показательно, и для нас ближе и понятней.
Отчет (5,7МВ, 50 стр.) можно скачать здесь.
Я же, как обычно, попытаюсь дать «сухой остаток» ключевых моментов (с моей кочки зрения)).
1️⃣ С помощью СУЩЕСТВУЮЩИХ технологий в Дании можно роботизировать (интеллектуально автоматизировать) 40% рабочих часов всех трудящихся (для инфы: в среднем по миру эта цифра 49%).
Для разных индустрий этот показатель сильно разнится – см. диаграмму
2️⃣ Для разных специальностей это будет сильно по-разному: для профессий с высокой долей рутинных предсказуемых операций можно роботизировать до 73% рабочего времени, а для профессий, где много интерактивных, не рутинных и плохо предсказуемых операций, максимум можно роботизировать до 19% рабочего времени – см. диаграмму
Лучше всего роботизируются среднеоплачиваемые специальности (НЕ высоко и НЕ низкооплачиваемые) в диапазоне зарплат $45-$60 тыс. в год.
3️⃣ Существует несколько сценариев – см. диаграмму - того, как эта роботизация будет происходить в реальности. Они зависят от (1) уровня оптимизма (ранний/поздний), (2) от распространенности (освоенности) технологии и (3) потенциала роботизируемости.
На всех интересующий вопрос «Через сколько лет, самое раннее, машины смогут симулировать ВСЕ аспекты человеческого интеллекта», ответ такой: <10 лет (5% участников опрошенных специалистов) , 11-25 лет (2%), 26-50 лет(11%), 50+ лет (41%), никогда (41%).
Мой голос приплюсуйте к последним 41% 😎
#Роботы #McKinsey
Недавно я писал о том, что из себя представляет роботизация на самом деле. Оказалось, что это мало похоже на то, что пишут на эту тему вендоры, исследователи и журналисты.
Теперь, в продолжение темы, хочу привести хороший пример – анализ состояния роботизации в конкретной стране – Дании. Такой пример ценен вдвойне:
1) Это анализ хороших бизнес-консультантов (McKinsey).
2) Большинство анализов дает обобщенные цифры по миру или континентам (что сильно смазывает картину). Если же приводят страну, так обычно это США, довольно сильно оторвавшаяся в данном вопросе от большинства стран, или Китай, где все вообще сильно по-своему. Ну а Дания, в этом смысле, - показательно, и для нас ближе и понятней.
Отчет (5,7МВ, 50 стр.) можно скачать здесь.
Я же, как обычно, попытаюсь дать «сухой остаток» ключевых моментов (с моей кочки зрения)).
1️⃣ С помощью СУЩЕСТВУЮЩИХ технологий в Дании можно роботизировать (интеллектуально автоматизировать) 40% рабочих часов всех трудящихся (для инфы: в среднем по миру эта цифра 49%).
Для разных индустрий этот показатель сильно разнится – см. диаграмму
2️⃣ Для разных специальностей это будет сильно по-разному: для профессий с высокой долей рутинных предсказуемых операций можно роботизировать до 73% рабочего времени, а для профессий, где много интерактивных, не рутинных и плохо предсказуемых операций, максимум можно роботизировать до 19% рабочего времени – см. диаграмму
Лучше всего роботизируются среднеоплачиваемые специальности (НЕ высоко и НЕ низкооплачиваемые) в диапазоне зарплат $45-$60 тыс. в год.
3️⃣ Существует несколько сценариев – см. диаграмму - того, как эта роботизация будет происходить в реальности. Они зависят от (1) уровня оптимизма (ранний/поздний), (2) от распространенности (освоенности) технологии и (3) потенциала роботизируемости.
На всех интересующий вопрос «Через сколько лет, самое раннее, машины смогут симулировать ВСЕ аспекты человеческого интеллекта», ответ такой: <10 лет (5% участников опрошенных специалистов) , 11-25 лет (2%), 26-50 лет(11%), 50+ лет (41%), никогда (41%).
Мой голос приплюсуйте к последним 41% 😎
#Роботы #McKinsey
Yandex.Disk
DANISH automation.JPG
View and download from Yandex.Disk
НАШЕ СЕКСУАЛЬНОЕ БУДУЩЕЕ С РОБОТАМИ
В отчете сделана попытка ответить на ключевые вопросы о будущем секса с роботами.
Цель отчета – попытка понять:
— что здесь в принципе возможно;
— чего можно достичь в ближайшее время;
— как это изменит человека и человечество.
Дело в том, что, не смотря на страшную интригуемость темы, о ней очень мало пишут, и потому о ней очень мало известно.
Кто, например, слышал о проекте датского фотографа Бениты Маркуссен, с 2011 года документирующей в фотографиях жизнь сообщества мужчин, живущих с анатомически правильными латексными куклами? А ведь каждый год только в Дании 400 индивидуальных, скульптурных кукол отправляются в новые дома, улучшая качество жизни мужчин, чье одиночество, трудности отношений с женщинами или социальная пустота, сексуально и духовно побудили их войти в нетрадиционную, неортодоксальную форму жизни - жизнь с куклой.
Несмотря на то, что эти люди живут на окраине нормальности, они находят глубокую привязанность, комфорт и радость в куклах. В то время как некоторые мужчины одиноки, другие представляют куклу своей жене, считая их намного больше, чем секс-игрушкой…
Ключевой вопрос отчета - какие отношения мы можем иметь с роботом?
Ведь уже сейчас, когда роботы только начинают общаться с нами на примитивном уровне, в мире живут сотни людей, по-настоящему влюбленных в своих «компаньонов» (для них это уже не куклы).
В отчете анализируются возможности преодоления т.н. «зловещей долины» – роста неприязни и даже отвращения у людей при общении с роботами по мере повышения их физического (степень антропоморфности) и психического (уровень эмоциональной адекватности) подобия человеку.
Также весьма интересен вопрос об использовании таких роботов для массового решения проблем социальной изоляции.
Ведь безусловный базовый доход сможет удовлетворить лишь материальные запросы «лишних людей» будущего.
А как быть с нематериальными? Например, с выходом из социальной изоляции?
Согласно одному из обсуждаемых сценариев будущего «к 2100 году человечество расколется на биологические касты» – оригинальная статья здесь. И «касте интеллектуальной элиты» демократических стран тогда потребуется решение проблемы социальной изоляции широких масс из «касты интеллектуальных недотеп».
Для этого может потребоваться радикальное снижение цены «компаньонов» с теперешних $5-$15 тыс. до цены смартфона. Но уж с чем человечество уже научилось обходиться, так со снижением цен путем коммодизации.
А вот с остальным (степень антропоморфности и уровень эмоциональной адекватности) еще работать и работать.
- - - - -
Скачать отчет можно здесь. А вот ссылки на статьи: The Telegraph, The Guardian, BBC, содержащие и видео.
#Роботы #CценарииБудущего
Так называется новый отчет FRR – ассоциации по междисциплинарным исследованиям роботов, куда входят десятки известных специалистов по этике и математике, философии и AI, юристов и журналистов и т.д. В отчете сделана попытка ответить на ключевые вопросы о будущем секса с роботами.
Цель отчета – попытка понять:
— что здесь в принципе возможно;
— чего можно достичь в ближайшее время;
— как это изменит человека и человечество.
Дело в том, что, не смотря на страшную интригуемость темы, о ней очень мало пишут, и потому о ней очень мало известно.
Кто, например, слышал о проекте датского фотографа Бениты Маркуссен, с 2011 года документирующей в фотографиях жизнь сообщества мужчин, живущих с анатомически правильными латексными куклами? А ведь каждый год только в Дании 400 индивидуальных, скульптурных кукол отправляются в новые дома, улучшая качество жизни мужчин, чье одиночество, трудности отношений с женщинами или социальная пустота, сексуально и духовно побудили их войти в нетрадиционную, неортодоксальную форму жизни - жизнь с куклой.
Несмотря на то, что эти люди живут на окраине нормальности, они находят глубокую привязанность, комфорт и радость в куклах. В то время как некоторые мужчины одиноки, другие представляют куклу своей жене, считая их намного больше, чем секс-игрушкой…
Ключевой вопрос отчета - какие отношения мы можем иметь с роботом?
Ведь уже сейчас, когда роботы только начинают общаться с нами на примитивном уровне, в мире живут сотни людей, по-настоящему влюбленных в своих «компаньонов» (для них это уже не куклы).
В отчете анализируются возможности преодоления т.н. «зловещей долины» – роста неприязни и даже отвращения у людей при общении с роботами по мере повышения их физического (степень антропоморфности) и психического (уровень эмоциональной адекватности) подобия человеку.
Также весьма интересен вопрос об использовании таких роботов для массового решения проблем социальной изоляции.
Ведь безусловный базовый доход сможет удовлетворить лишь материальные запросы «лишних людей» будущего.
А как быть с нематериальными? Например, с выходом из социальной изоляции?
Согласно одному из обсуждаемых сценариев будущего «к 2100 году человечество расколется на биологические касты» – оригинальная статья здесь. И «касте интеллектуальной элиты» демократических стран тогда потребуется решение проблемы социальной изоляции широких масс из «касты интеллектуальных недотеп».
Для этого может потребоваться радикальное снижение цены «компаньонов» с теперешних $5-$15 тыс. до цены смартфона. Но уж с чем человечество уже научилось обходиться, так со снижением цен путем коммодизации.
А вот с остальным (степень антропоморфности и уровень эмоциональной адекватности) еще работать и работать.
- - - - -
Скачать отчет можно здесь. А вот ссылки на статьи: The Telegraph, The Guardian, BBC, содержащие и видео.
#Роботы #CценарииБудущего
Ваша походка – «золотая», и это цель эволюции
В прошлую пятницу я писал, как с помощью Золотого сечения можно реализовать оптимальную стратегию в игре Ультиматум. Сегодняшний пост – о том, как с помощью той же самой стратегии можно оптимально управлять процессом ходьбы гуманоидов (людей, антропоморфных роботов, нейро-роботов для реабилитации и т.д.)
Золотое сечение – это универсальное правило, отражающее гармонию в мире. Его можно описать словами (меньшая часть относится к большей, как большая ко всему целому), иррациональным числом 1,6180339887... или пропорцией 62:38.
Это правило мироздания известно со времен Древнего Египта и проявляется повсюду: в математике, изобразительном искусстве, архитектуре, музыке, стихах …
В последние годы Золотое сечение было обнаружено во многих физических и биологических фрактальных структурах, которые самоорганизуются так, что структура более крупного масштаба напоминает структуру субъединиц: тела животных, кровеносная система, листья растений.
Золотое сечение обнаружили в звездных системах, моделях финансового рынка, физиологической активности сердца, теории игр, при вычислении «функции оценки справедливости» и «экономической гармонии» и много где еще.
Уникальным свойством Золотого сечения является его оптимальность. В чем секрет этой оптимальности – далеко не всегда понятно. Но ясно одно – Золотое сечение, каким-то образом, обеспечивает гармонию или баланс.
И вот найдено новое проявление Золотого сечения – человеческая ходьба https://goo.gl/oU8T2L .
Дело в том, что ходьба – это очень сложная задача, которая включает в себя работу сотни мышц, костей и суставов, работающих вместе, чтобы произвести гармонические движения, обеспечивающие равновесие (баланс) между продвижением вперед и поддержанием стабильности.
Авторы новой работы предложили новое понимание человеческой ходьбы, как компромисса между продвижением и равновесием. Оптимальная стратегия обеспечения этого компромисса - та же самая, что и в игре Ультиматум. Т.е. снова на сцену выходит Золотое сечение.
Золотое сечение определяет пропорцию между двумя биомеханическими фазами ходьбы - фазой опоры и фазой переноса в соотношении 62:38, что является оптимальным для минимизации энергетических затрат и оптимизирует распределение потенциальной и кинетической энергии при движении.
Авторы работы даже высказывают гипотезу, что целью тысяч лет эволюции человеческого тела было достижение золотых пропорций и, в первую очередь, «золотой походки».
Я же от себя добавлю. Если когда-нибудь люди смогут подобрать параметры для устойчивого развития человечества (Sustainable Development) - оптимальный компромисс между движением вперед и обеспечением равновесия (баланса) – то эти параметру, скорее всего, будут строиться по принципу Золотого сечения.
#ТеорияИгр #Эволюция #Роботы
В прошлую пятницу я писал, как с помощью Золотого сечения можно реализовать оптимальную стратегию в игре Ультиматум. Сегодняшний пост – о том, как с помощью той же самой стратегии можно оптимально управлять процессом ходьбы гуманоидов (людей, антропоморфных роботов, нейро-роботов для реабилитации и т.д.)
Золотое сечение – это универсальное правило, отражающее гармонию в мире. Его можно описать словами (меньшая часть относится к большей, как большая ко всему целому), иррациональным числом 1,6180339887... или пропорцией 62:38.
Это правило мироздания известно со времен Древнего Египта и проявляется повсюду: в математике, изобразительном искусстве, архитектуре, музыке, стихах …
В последние годы Золотое сечение было обнаружено во многих физических и биологических фрактальных структурах, которые самоорганизуются так, что структура более крупного масштаба напоминает структуру субъединиц: тела животных, кровеносная система, листья растений.
Золотое сечение обнаружили в звездных системах, моделях финансового рынка, физиологической активности сердца, теории игр, при вычислении «функции оценки справедливости» и «экономической гармонии» и много где еще.
Уникальным свойством Золотого сечения является его оптимальность. В чем секрет этой оптимальности – далеко не всегда понятно. Но ясно одно – Золотое сечение, каким-то образом, обеспечивает гармонию или баланс.
И вот найдено новое проявление Золотого сечения – человеческая ходьба https://goo.gl/oU8T2L .
Дело в том, что ходьба – это очень сложная задача, которая включает в себя работу сотни мышц, костей и суставов, работающих вместе, чтобы произвести гармонические движения, обеспечивающие равновесие (баланс) между продвижением вперед и поддержанием стабильности.
Авторы новой работы предложили новое понимание человеческой ходьбы, как компромисса между продвижением и равновесием. Оптимальная стратегия обеспечения этого компромисса - та же самая, что и в игре Ультиматум. Т.е. снова на сцену выходит Золотое сечение.
Золотое сечение определяет пропорцию между двумя биомеханическими фазами ходьбы - фазой опоры и фазой переноса в соотношении 62:38, что является оптимальным для минимизации энергетических затрат и оптимизирует распределение потенциальной и кинетической энергии при движении.
Авторы работы даже высказывают гипотезу, что целью тысяч лет эволюции человеческого тела было достижение золотых пропорций и, в первую очередь, «золотой походки».
Я же от себя добавлю. Если когда-нибудь люди смогут подобрать параметры для устойчивого развития человечества (Sustainable Development) - оптимальный компромисс между движением вперед и обеспечением равновесия (баланса) – то эти параметру, скорее всего, будут строиться по принципу Золотого сечения.
#ТеорияИгр #Эволюция #Роботы
Frontiers
Golden Gait: An Optimization Theory Perspective on Human and Humanoid Walking
Human walking is a complex task which includes hundreds of muscles, bones and joints working together to deliver harmonic movements with the need of finding equilibrium between moving forward and maintaining stability. Many different computational approaches…
Полуживые роботы уже на подходе.
Люди привыкли считать, что робот не может быть живым (иначе это уже иное живое существо). А т.к. изготавливать живых существ мы пока не умеем, то и нечего пока говорить о живых роботах.
Однако, такое умозаключение ошибочно. Живые роботы уже на подходе. Точнее, их 1е поколение – полуживые роботы (ПЖРы).
ПЖР – это робот, не обладающий возможностями к размножению и эволюции, однако способный наращивать свои адаптационные возможности, физически развивая свое искусственное тело, используя для этого подручные материалы.
Иначе говоря, ПЖРы растут и развиваются в течение жизни. А поскольку жить ПЖР может сильно долго (а по человеческим меркам и бесконечно), получается, что ПЖРу размножение и эволюция не нужны. Достаточно умения расти.
И, следовательно, такой ПЖР становится уже не полуживым, а живым существом, не нуждающимся в размножении и эволюции и эволюционирующим в течение своей бесконечной жизни.
Вышеприведенные соображения – не плод фантазии. Направление исследований по созданию растущих роботов (исследователи побаиваются использовать определения типа ПЖР) бурно развивается.
Только что вышедший фундаментальный обзор «На пути к растущим роботам: историческая эволюция сотовой и растительной робототехники» https://goo.gl/mRAaNr помогает понять состояние и перспективы ПЖРов.
Попробую отжать сухой остаток обзора, который я вам рекомендую хотя бы пролистать, просмотрев отличные иллюстрации типа этой https://goo.gl/3fzwCL, сравнивающей биомодели человека и ПЖРа.
1) Есть разные подходы к решению задачи морфологической адаптации искусственных систем, например, самосборка, самоперестраиваемость, эволюция виртуальных существ и т.д.
2) В обзоре рассмотрены основные вехи развития ПЖРов, начиная с оригинальной концепции авторепликационного автомата и заканчивая новейшими концепциями, навеянными растениями (типа саморазвивающихся мягких роботов, способных двигаться, выращивая и строя свою корневую систему путем использования аддитивных технологий https://goo.gl/hJXXTw - правда ведь круто!).
3) Рассмотрено 1е поколение ПЖРов – сотовые роботы, – описанные еще у Лема в «Непобедимом». Это что-то типа роя простых или примитивных интеллектов (типа социальных насекомых), организующихся в группы или сообщества для координации и сотрудничества. Они реализуют концепцию динамической реконфигурации и могут взаимодействовать друг с другом, автоматически подключаясь и отключаясь, образуя единый модуль (типа ткани в нашем понимании), а несколько модулей собираются для создания единого ПЖРа.
4) Рассмотрено 2е поколение – молекулярных роботов, – вдохновленных полимеризацией молекул при образовании ДНК. Они основаны на броуновском движении, не способны на активное отключение, но приобретают функционализацию после установления связи, что приводит к образованию сборок, трактуемых как рост.
5) Помимо молекулярных роботов, позволяющих «печатать» 2D и 3D модули ПЖРов размером до 10х10х10 см, существуют клеткоподобные и организмоподобные ПЖРы, позволяющие «печатать» модули размером, соответственно, до 26 см и 50 см по одной из 3D координат (см. https://goo.gl/tyeUeF)
6) Также рассмотрено 3е поколение – гибридных ПЖРов, – лежащих на границе между роевым роботом и самомонтирующимся мобильным роботом.
7) Ну и самое крутое 4е поколение организмоподобных ПЖРов, вдохновленных стратегиями роста грибов и растений. В отличие от клеткоподобных ПЖРов, организмоподобные ПЖРы включают в себя одномодульные системы, которые могут постепенно добавлять материал в определенные области своего тела.
За резюме отправляю вас к обзору (из него слова не выкинешь).
От себя добавлю. Пока люди будут спорить, чем отличаются искусственный и естественный интеллекты, само понятие искусственности может исчезнуть, поскольку изменятся понятия живых существ, их эволюции и самой жизни. И все это из-за ПЖРов.
#Роботы
Люди привыкли считать, что робот не может быть живым (иначе это уже иное живое существо). А т.к. изготавливать живых существ мы пока не умеем, то и нечего пока говорить о живых роботах.
Однако, такое умозаключение ошибочно. Живые роботы уже на подходе. Точнее, их 1е поколение – полуживые роботы (ПЖРы).
ПЖР – это робот, не обладающий возможностями к размножению и эволюции, однако способный наращивать свои адаптационные возможности, физически развивая свое искусственное тело, используя для этого подручные материалы.
Иначе говоря, ПЖРы растут и развиваются в течение жизни. А поскольку жить ПЖР может сильно долго (а по человеческим меркам и бесконечно), получается, что ПЖРу размножение и эволюция не нужны. Достаточно умения расти.
И, следовательно, такой ПЖР становится уже не полуживым, а живым существом, не нуждающимся в размножении и эволюции и эволюционирующим в течение своей бесконечной жизни.
Вышеприведенные соображения – не плод фантазии. Направление исследований по созданию растущих роботов (исследователи побаиваются использовать определения типа ПЖР) бурно развивается.
Только что вышедший фундаментальный обзор «На пути к растущим роботам: историческая эволюция сотовой и растительной робототехники» https://goo.gl/mRAaNr помогает понять состояние и перспективы ПЖРов.
Попробую отжать сухой остаток обзора, который я вам рекомендую хотя бы пролистать, просмотрев отличные иллюстрации типа этой https://goo.gl/3fzwCL, сравнивающей биомодели человека и ПЖРа.
1) Есть разные подходы к решению задачи морфологической адаптации искусственных систем, например, самосборка, самоперестраиваемость, эволюция виртуальных существ и т.д.
2) В обзоре рассмотрены основные вехи развития ПЖРов, начиная с оригинальной концепции авторепликационного автомата и заканчивая новейшими концепциями, навеянными растениями (типа саморазвивающихся мягких роботов, способных двигаться, выращивая и строя свою корневую систему путем использования аддитивных технологий https://goo.gl/hJXXTw - правда ведь круто!).
3) Рассмотрено 1е поколение ПЖРов – сотовые роботы, – описанные еще у Лема в «Непобедимом». Это что-то типа роя простых или примитивных интеллектов (типа социальных насекомых), организующихся в группы или сообщества для координации и сотрудничества. Они реализуют концепцию динамической реконфигурации и могут взаимодействовать друг с другом, автоматически подключаясь и отключаясь, образуя единый модуль (типа ткани в нашем понимании), а несколько модулей собираются для создания единого ПЖРа.
4) Рассмотрено 2е поколение – молекулярных роботов, – вдохновленных полимеризацией молекул при образовании ДНК. Они основаны на броуновском движении, не способны на активное отключение, но приобретают функционализацию после установления связи, что приводит к образованию сборок, трактуемых как рост.
5) Помимо молекулярных роботов, позволяющих «печатать» 2D и 3D модули ПЖРов размером до 10х10х10 см, существуют клеткоподобные и организмоподобные ПЖРы, позволяющие «печатать» модули размером, соответственно, до 26 см и 50 см по одной из 3D координат (см. https://goo.gl/tyeUeF)
6) Также рассмотрено 3е поколение – гибридных ПЖРов, – лежащих на границе между роевым роботом и самомонтирующимся мобильным роботом.
7) Ну и самое крутое 4е поколение организмоподобных ПЖРов, вдохновленных стратегиями роста грибов и растений. В отличие от клеткоподобных ПЖРов, организмоподобные ПЖРы включают в себя одномодульные системы, которые могут постепенно добавлять материал в определенные области своего тела.
За резюме отправляю вас к обзору (из него слова не выкинешь).
От себя добавлю. Пока люди будут спорить, чем отличаются искусственный и естественный интеллекты, само понятие искусственности может исчезнуть, поскольку изменятся понятия живых существ, их эволюции и самой жизни. И все это из-за ПЖРов.
#Роботы
Frontiers
Toward Growing Robots: A Historical Evolution from Cellular to Plant-Inspired Robotics
This paper provides the very first definition of “growing robots”: a category of robots that imitates biological growth by the incremental addition of material. Although this nomenclature is quite new, the concept of morphological evolution, which is behind…
Самодельный робот-собачка за $1K – предвестник революции роботов
Многие считают, что техно-революции происходят при скачкообразном росте возможностей продуктов новых технологий. Однако, на самом деле, это совсем не так.
Техно-революции происходят при скачкообразном снижении цен на такие продукты. Персоналки, лаптопы, айподы, айпады, айфоны и т.п., к моменту их превращения в массовый продукт, обладали возможностями (функционалом), придуманными и реализованными за годы до этого.
Но вот бах – цена на гаджет вдруг резко упала … И началась очередная техно-революция.
С роботами все произойдет ровно так же.
Как ни чаруют нас пируэты, выписываемые четвероногими роботами, типа SpotMini и RHex от Boston Dynamics, но никому даже не приходит в голову говорить о техно-революции, пока эти «песики» стоят как хорошее авто.
А за сколько бы вы купили себе механического четвероногого друга, способного выполнять широчайший набор функций – от антидепрессанта до поводыря?
Исследователи из Центра киберфизических систем, IISc, Бангалор, Индия, совершили прорыв, создав робота-собачку за $1K. Его зовут Stoch (на русском имя надо менять во избежание ассоциации «чтоб ты stoch»).
Помимо главного отличия – цены, в 30 раз ниже всех подобных роботов, этот песик размером с болонку:
- собирается, подобно мебели IKEA из набора стандартных деталей, часть из которых печатается на 3D принтере;
- способен бегать разными аллюрами (рысь, галоп, …) без всякого там Глубокого Обучения, и даже без датчиков обратной связи.
Т.е. ни тебе больших данных, ни высокой вычислительной производительности, ничего дорого и сложного. Всего-то 4 ноги с сегментами по 120 мм и суставами, гнущимися под 45 и 70 градусов со скоростью 461 градус в сек. Да по сервомоторчику 16W на каждую ногу. Да одна плата Raspberry Pi 3b, рассчитывающая с помощью системы нелинейных дифф-уравнений координаты, которые затем используются для генерации углов соединения посредством обратной кинематики. И всё!
А бегает и скачет собачка вполне приемлемо. И когда ей добавят несколько датчиков обратной связи будет хоть вальс танцевать, хоть на задних лапках служить.
И учтите, будучи запущенной в серию, даже с учетом украшения собачки пушистой шкурой с хвостом, цена собачки будет не дороже смартфона.
А значит революция роботов начинается.
• 2 минутное видео про Stoch (конструкция, принцип работы и живое бегание) https://www.youtube.com/watch?v=Wxx9pwwTIL4&feature=youtu.be
• Исчерпывающая авторская статья про Stoch https://arxiv.org/abs/1901.00697
#Роботы
Многие считают, что техно-революции происходят при скачкообразном росте возможностей продуктов новых технологий. Однако, на самом деле, это совсем не так.
Техно-революции происходят при скачкообразном снижении цен на такие продукты. Персоналки, лаптопы, айподы, айпады, айфоны и т.п., к моменту их превращения в массовый продукт, обладали возможностями (функционалом), придуманными и реализованными за годы до этого.
Но вот бах – цена на гаджет вдруг резко упала … И началась очередная техно-революция.
С роботами все произойдет ровно так же.
Как ни чаруют нас пируэты, выписываемые четвероногими роботами, типа SpotMini и RHex от Boston Dynamics, но никому даже не приходит в голову говорить о техно-революции, пока эти «песики» стоят как хорошее авто.
А за сколько бы вы купили себе механического четвероногого друга, способного выполнять широчайший набор функций – от антидепрессанта до поводыря?
Исследователи из Центра киберфизических систем, IISc, Бангалор, Индия, совершили прорыв, создав робота-собачку за $1K. Его зовут Stoch (на русском имя надо менять во избежание ассоциации «чтоб ты stoch»).
Помимо главного отличия – цены, в 30 раз ниже всех подобных роботов, этот песик размером с болонку:
- собирается, подобно мебели IKEA из набора стандартных деталей, часть из которых печатается на 3D принтере;
- способен бегать разными аллюрами (рысь, галоп, …) без всякого там Глубокого Обучения, и даже без датчиков обратной связи.
Т.е. ни тебе больших данных, ни высокой вычислительной производительности, ничего дорого и сложного. Всего-то 4 ноги с сегментами по 120 мм и суставами, гнущимися под 45 и 70 градусов со скоростью 461 градус в сек. Да по сервомоторчику 16W на каждую ногу. Да одна плата Raspberry Pi 3b, рассчитывающая с помощью системы нелинейных дифф-уравнений координаты, которые затем используются для генерации углов соединения посредством обратной кинематики. И всё!
А бегает и скачет собачка вполне приемлемо. И когда ей добавят несколько датчиков обратной связи будет хоть вальс танцевать, хоть на задних лапках служить.
И учтите, будучи запущенной в серию, даже с учетом украшения собачки пушистой шкурой с хвостом, цена собачки будет не дороже смартфона.
А значит революция роботов начинается.
• 2 минутное видео про Stoch (конструкция, принцип работы и живое бегание) https://www.youtube.com/watch?v=Wxx9pwwTIL4&feature=youtu.be
• Исчерпывающая авторская статья про Stoch https://arxiv.org/abs/1901.00697
#Роботы
YouTube
Design, Development and Experimental Realization of a Quadrupedal Research Platform: Stoch
Video attachment accepted for presentation in ICCAR 2019. Pre-print (on Arxiv) of the paper can be found in in the following link: http://arxiv.org/abs/1901.00697
Learning methods associated with the hardware (accepted for ICRA 2019): https://www.youtub…
Learning methods associated with the hardware (accepted for ICRA 2019): https://www.youtub…
Только представьте эту картину не слишком отдаленного будущего.
Роботизированные катера патрулируют океаны, выпуская подводные глайдеры для сбора информации об окружающей среде, и служа базой для дронов, управляющих глайдерами, собирающих их на роботизированные катера, а также служащих своего рода распределенной в воздухе антенной для ретрансляции радио сигналов между катерами и глайдерами.
А теперь представьте, что люди смогут сделать с помощью таких систем.
Это будет новый дивный OceanWorld, полный роботов, чувствующих и мгновенно реагирующих на легчайшие колебания в окружающей среде и тем самым позволяющий человечеству решать немыслимые раньше задачи.
Читать мой новый пост (в продолжение и прояснение предыдущего поста про робота-собачку) на 4 мин.:
- на Medium https://goo.gl/SE2cWX
- на Яндекс Дзен https://clck.ru/FG4oz
#Роботы
Роботизированные катера патрулируют океаны, выпуская подводные глайдеры для сбора информации об окружающей среде, и служа базой для дронов, управляющих глайдерами, собирающих их на роботизированные катера, а также служащих своего рода распределенной в воздухе антенной для ретрансляции радио сигналов между катерами и глайдерами.
А теперь представьте, что люди смогут сделать с помощью таких систем.
Это будет новый дивный OceanWorld, полный роботов, чувствующих и мгновенно реагирующих на легчайшие колебания в окружающей среде и тем самым позволяющий человечеству решать немыслимые раньше задачи.
Читать мой новый пост (в продолжение и прояснение предыдущего поста про робота-собачку) на 4 мин.:
- на Medium https://goo.gl/SE2cWX
- на Яндекс Дзен https://clck.ru/FG4oz
#Роботы
Medium
Нас ждет не Westworld, а Oceanworld
Океан полный роботов: на поверхности, в глубине и над ним
Роботы уже меняют нашу мораль.
В нас растут жестокость к людям и непреодолимая тяга к роботам.
Нагрузить вас перед уикендом сразу двумя крутыми исследованиями было бы не гуманно. Но исследования реально крутые и очень интересные. А фишка в том, что нужно их читать параллельно.
Но нам повезло. На помощь пришла Sigal Samuel, опубликовав в Vox синтетический анализ обоих исследований: популярным языком и со всеми полезными ссылками.
Мне же остается лишь сделать для вас наводку на резкость в этой теме.
Суть в том, что под влиянием роботов люди уже начали меняться. Причем, не в лучшую сторону и с ускорением.
1) Мы становимся более нетерпимыми и даже жестокими, перенося вседозволенность по отношению к роботам на людей.
2) Мы неуклонно движемся к тому, чтобы всюду, где это будет возможным, предпочитать общение с роботами, вместо людей (от кол-центра до постели)
Новое исследование Embodiment into a robot increases its acceptability – прорывное. Впервые экспериментально доказали, что процесс роста нашей жестокости к роботам можно остановить, и даже повернуть вспять.
Для этого оказывается достаточным:
А) начать видеть мир глазами робота;
Б) в буквальном смысле, влезть в его шкуру (то бишь, тело).
Изумительная выдумка авторов исследования сработала. Достаточно, надев VR очки и посмотрев на себя в зеркале, увидеть там Чудо-юдо Ужасное, как мы начинаем проникаться в нему симпатией и всяческой толерантностью. Короче, перечитайте «Превращение» Кафки и только представьте, насколько проще было бы семье Грегора Замза смириться с его новым гадким видом, имей они тогда VR очки с хорошим софтом.
Второе исследование Social Robots and Empathy: The Harmful Effects of Always Getting What We Want показывает, что сопереживание роботам может снижать нашу эмпатию к людям. Роботы устраняют для нас необходимость сопереживать другим людям, предоставляя нам возможность получать от роботов ровно то, что мы хотим (и как хотим) без каких-либо компромиссов.
Не поленитесь сходить и по иллюстративным ссылкам. Например, про китайское приложение Love and Producer, на которое в Поднебесной подсели уже миллионы женщин. И всего-то дел, - простенький симулятор свиданий с четырьмя мужчинами, с которыми можно развивать отношения по ходу сюжета игры. Плюс чуть-чуть мистики и немного фэнтези... И вот уже дамы берут смартфон в постель, предпочитая сладкоголосого виртуального героя мужу.
Прочтите пятиминутный пост Sigal Samuel
https://www.vox.com/future-perfect/2019/8/2/20746236/ai-robot-empathy-ethics-racism-gender-bias
А уж пойти ли по многочисленным приведенным там ссылкам, решите по ходу.
P.S. И вся эта гадость по отношению к виртуальным персонажам и роботам начинает проявляться в людях лишь после 30 месячного возраста. А до того матушка-природа уберегла, - нет в малых детях никакой тяги к виртуалам. Малышам нужны лишь живые люди. Получается, что первые 30 месяцев жизни дети всё еще пребывают как бы в раю. Ну а потом искушения е-культуры берут своё
https://news.vanderbilt.edu/2019/07/31/toddler-brains-resist-learning-from-screens-even-video-chat/
#Роботы #Эмпатия #Мораль
В нас растут жестокость к людям и непреодолимая тяга к роботам.
Нагрузить вас перед уикендом сразу двумя крутыми исследованиями было бы не гуманно. Но исследования реально крутые и очень интересные. А фишка в том, что нужно их читать параллельно.
Но нам повезло. На помощь пришла Sigal Samuel, опубликовав в Vox синтетический анализ обоих исследований: популярным языком и со всеми полезными ссылками.
Мне же остается лишь сделать для вас наводку на резкость в этой теме.
Суть в том, что под влиянием роботов люди уже начали меняться. Причем, не в лучшую сторону и с ускорением.
1) Мы становимся более нетерпимыми и даже жестокими, перенося вседозволенность по отношению к роботам на людей.
2) Мы неуклонно движемся к тому, чтобы всюду, где это будет возможным, предпочитать общение с роботами, вместо людей (от кол-центра до постели)
Новое исследование Embodiment into a robot increases its acceptability – прорывное. Впервые экспериментально доказали, что процесс роста нашей жестокости к роботам можно остановить, и даже повернуть вспять.
Для этого оказывается достаточным:
А) начать видеть мир глазами робота;
Б) в буквальном смысле, влезть в его шкуру (то бишь, тело).
Изумительная выдумка авторов исследования сработала. Достаточно, надев VR очки и посмотрев на себя в зеркале, увидеть там Чудо-юдо Ужасное, как мы начинаем проникаться в нему симпатией и всяческой толерантностью. Короче, перечитайте «Превращение» Кафки и только представьте, насколько проще было бы семье Грегора Замза смириться с его новым гадким видом, имей они тогда VR очки с хорошим софтом.
Второе исследование Social Robots and Empathy: The Harmful Effects of Always Getting What We Want показывает, что сопереживание роботам может снижать нашу эмпатию к людям. Роботы устраняют для нас необходимость сопереживать другим людям, предоставляя нам возможность получать от роботов ровно то, что мы хотим (и как хотим) без каких-либо компромиссов.
Не поленитесь сходить и по иллюстративным ссылкам. Например, про китайское приложение Love and Producer, на которое в Поднебесной подсели уже миллионы женщин. И всего-то дел, - простенький симулятор свиданий с четырьмя мужчинами, с которыми можно развивать отношения по ходу сюжета игры. Плюс чуть-чуть мистики и немного фэнтези... И вот уже дамы берут смартфон в постель, предпочитая сладкоголосого виртуального героя мужу.
Прочтите пятиминутный пост Sigal Samuel
https://www.vox.com/future-perfect/2019/8/2/20746236/ai-robot-empathy-ethics-racism-gender-bias
А уж пойти ли по многочисленным приведенным там ссылкам, решите по ходу.
P.S. И вся эта гадость по отношению к виртуальным персонажам и роботам начинает проявляться в людях лишь после 30 месячного возраста. А до того матушка-природа уберегла, - нет в малых детях никакой тяги к виртуалам. Малышам нужны лишь живые люди. Получается, что первые 30 месяцев жизни дети всё еще пребывают как бы в раю. Ну а потом искушения е-культуры берут своё
https://news.vanderbilt.edu/2019/07/31/toddler-brains-resist-learning-from-screens-even-video-chat/
#Роботы #Эмпатия #Мораль
Vox
Humans keep directing abuse — even racism — at robots
We abuse our robots. That’s a problem.
ИИ – это Инопланетный Интеллект.
Но сделана 1я попытка превратить его в земной.
Интеллект Чужого (Alien) кардинально отличается от интеллекта любого земного существа от мыши до человека.
Например, интеллект «чужих» трисоляриан из трилогии Лю Цысиня стал принципиально иным, чем земной, из-за иной системы коммуникаций между особями – чтение мыслей, точнее, образов и их экзограмм. Это привело к формированию интеллекта, в котором отсутствует ложь. Кстати, подобный интеллект есть и на нашей планете. Но он не земной, а водный. Это дельфины, читающие мысли друг друга и потому не знающие лжи. Но про это как-нибудь в следующий раз.
Вот понятный пример, показывающий принципиальное отличие ИИ от интеллекта человека или мыши – ориентация и навигация в пространстве.
ИИ навигаторов в этом столь же преуспел, как и в настольных играх. Ориентироваться в городских пробках и прокладывать оптимальные маршруты он умеет лучше любого из нас. Однако:
- он делает это совсем иначе, чем мы;
- мы имеем в голове (1) модель пространства, (2) модель своего тела и его возможностей, (3) оптимизатор достижения целей с учетом 1 и 2;
- ИИ навигатора имеет в «голове» 1 и 3. Но 2 – абсолютно иной. Это море данных о движении многих тысяч авто по модели пространства.
При этом, ИИ навигатор не может решить, можно ли убрать с дороги легкое препятствие или перепрыгнуть небольшую канаву.
Из-за этой разницы, в вопросах навигации наш интеллект (или мыши) – универсальный земной. А ИИ навигатора – специализированный неземной.
Т.е. человек или мышь могут решать любую задачу о прокладывании маршрута из А в Б.
Например, при движении по комнате, где нужно огибать неустранимые препятствия (типа шкафа) и убирать или преодолевать устранимые (типа стула или фикуса). И в целом, соизмерять свои возможности с динамикой перемещения в конкретном физическом пространстве (см. рис.)
А ИИ навигатор этого не может.
Но что если вложить в голову ИИ навигатору нового поколения 3х мерную модель пространства и модель его тела и его возможностей?
Ведь это будет заветный мост между роботами и ИИ. Мост, которого почти нет. А есть лишь убогие «веревочные лестницы» через пропасть.
Роботы-собачки от Boston Dynamics или «луноход» робота-курьера Яндекса способны огибать препятствия, но у них все еще нет возможностей для универсальной ориентации и навигации в пространстве. Они неспособны сами воссоздавать в своей «голове» модель пространства и, зная возможности своего «тела», находить оптимальный маршрут передвижения к цели.
Попыткой решить эту задачу стал «Интерактивный Гибсон» - навигатор/оптимизатор интерактивной навигации в загроможденных средах. Его работа основана на нахождении компромисса между эффективностью пути навигации и возможными нарушениями положения окружающих объектов.
Сначала его научили «земному» способу навигации в виртуальных пространствах с учетом физических взаимодействий со средой. Теперь на очереди материальная физическая среда.
https://arxiv.org/abs/1910.14442
Как сказал по этому поводу Джек Кларк - «миры робототехники и ИИ становятся все более и более смешанными. Вопрос на $1 триллион состоит в том, в какой момент обе технологии объединятся, разовьются и дадут возможности, превышающие сумму их частей».
#ИИ #Роботы
Но сделана 1я попытка превратить его в земной.
Интеллект Чужого (Alien) кардинально отличается от интеллекта любого земного существа от мыши до человека.
Например, интеллект «чужих» трисоляриан из трилогии Лю Цысиня стал принципиально иным, чем земной, из-за иной системы коммуникаций между особями – чтение мыслей, точнее, образов и их экзограмм. Это привело к формированию интеллекта, в котором отсутствует ложь. Кстати, подобный интеллект есть и на нашей планете. Но он не земной, а водный. Это дельфины, читающие мысли друг друга и потому не знающие лжи. Но про это как-нибудь в следующий раз.
Вот понятный пример, показывающий принципиальное отличие ИИ от интеллекта человека или мыши – ориентация и навигация в пространстве.
ИИ навигаторов в этом столь же преуспел, как и в настольных играх. Ориентироваться в городских пробках и прокладывать оптимальные маршруты он умеет лучше любого из нас. Однако:
- он делает это совсем иначе, чем мы;
- мы имеем в голове (1) модель пространства, (2) модель своего тела и его возможностей, (3) оптимизатор достижения целей с учетом 1 и 2;
- ИИ навигатора имеет в «голове» 1 и 3. Но 2 – абсолютно иной. Это море данных о движении многих тысяч авто по модели пространства.
При этом, ИИ навигатор не может решить, можно ли убрать с дороги легкое препятствие или перепрыгнуть небольшую канаву.
Из-за этой разницы, в вопросах навигации наш интеллект (или мыши) – универсальный земной. А ИИ навигатора – специализированный неземной.
Т.е. человек или мышь могут решать любую задачу о прокладывании маршрута из А в Б.
Например, при движении по комнате, где нужно огибать неустранимые препятствия (типа шкафа) и убирать или преодолевать устранимые (типа стула или фикуса). И в целом, соизмерять свои возможности с динамикой перемещения в конкретном физическом пространстве (см. рис.)
А ИИ навигатор этого не может.
Но что если вложить в голову ИИ навигатору нового поколения 3х мерную модель пространства и модель его тела и его возможностей?
Ведь это будет заветный мост между роботами и ИИ. Мост, которого почти нет. А есть лишь убогие «веревочные лестницы» через пропасть.
Роботы-собачки от Boston Dynamics или «луноход» робота-курьера Яндекса способны огибать препятствия, но у них все еще нет возможностей для универсальной ориентации и навигации в пространстве. Они неспособны сами воссоздавать в своей «голове» модель пространства и, зная возможности своего «тела», находить оптимальный маршрут передвижения к цели.
Попыткой решить эту задачу стал «Интерактивный Гибсон» - навигатор/оптимизатор интерактивной навигации в загроможденных средах. Его работа основана на нахождении компромисса между эффективностью пути навигации и возможными нарушениями положения окружающих объектов.
Сначала его научили «земному» способу навигации в виртуальных пространствах с учетом физических взаимодействий со средой. Теперь на очереди материальная физическая среда.
https://arxiv.org/abs/1910.14442
Как сказал по этому поводу Джек Кларк - «миры робототехники и ИИ становятся все более и более смешанными. Вопрос на $1 триллион состоит в том, в какой момент обе технологии объединятся, разовьются и дадут возможности, превышающие сумму их частей».
#ИИ #Роботы
{kind=link}
Это может быть революцией роботов.
За которой маячит революция AGI.
Проясняется, на что рассчитывает DeepMind, прожигая миллиарды. И честно говоря, задача того стоит. Это действительно ИИ общего назначения (AGI). Собственно, руководство DeepMind этого и не скрывало. Но вот как они планируют этого добиться, было непонятно. А теперь проясняется.
Стратегическая логика здесь такова.
1) AGI должен быть воплощенным.
Значит полагаться только на алгоритмы настольных и компьютерных игр (всякие там AlphaGo, Alphazero … ) нет смысла.
2) Значит речь о роботах, материализованных и действующих в физическом мире.
3) Первейший ключевой навык для робота – движение (сенсорно-моторные навыки, направленные на достижения цели). И главный фокус здесь в том, чтобы для обучения движению роботу не требовалось море данных, как это принято у алгоритмов типа Alphazero. Надо чтобы робот попробовал некое разумное число раз, - и научился.
4) Но движение бывает разное. Для муравья, воробья и карася – это совсем не одно и то же (разные среды). Более того: для сухопутных паука, червяка и барсука– это тоже совсем не одно и то же (разные способы и механизмы движения).
Значит нужно, чтобы робот мог самостоятельно учиться УНИВЕРСАЛЬНОМУ движению.
5) Что потом? Да понятно что. Ведь из примитивов универсального движения, возможно, и складывается механизм мышления. И значит, второе может быть получено на основе первого.
К реализации п. 3 DeepMind приступил 2 года назад, создав новую парадигму обучения — Scheduled Auxiliary Control или SAC-X (запланированное вспомогательное управление). Подробней см. здесь.
Парадигма SAC-X основана на идее, что для выполнения сложных задач ИИ должен сначала научиться исследовать доступную зону и овладеть набором базовых навыков.
С реализацией п. 4 связана опубликованная на днях работа «Towards General and Autonomous Learning of Core Skills: A Case Study in Locomotion». В ней на основе SAC-X предложено универсальное решение управления моторикой непосредственно из исходных сенсорных входов. DeepMind разработал систему обучения, которая может учиться сложному поведению локомоции для широкого спектра N-ногих роботов, таких как двуногие, трехногие, четвероногие, шестиногие … включая колесные варианты (см. приложенное видео)
DeepMind сделал это, не изменив функции вознаграждения для разных роботов. Их подход позволяет научиться управлять новыми роботами всего за пару часов. Суть подхода в том, что он многозадачен: эффективнее пытаться учиться сразу нескольким навыкам, а не учиться им последовательно.
Если новый подход DeepMind взлетит, - это будет революция в мире роботов.
Ну а дальше будут пытаться реализовать п.5.
Благо зацепки, как из примитивов универсального движения эволюционно получить примитивы мышления уже есть. И хотя это было пока что сделано только для дельфинов (для их локомоции в водной среде), но и с универсальным движением может получиться.
И тогда случится революция AGI.
#Роботы #AGI
За которой маячит революция AGI.
Проясняется, на что рассчитывает DeepMind, прожигая миллиарды. И честно говоря, задача того стоит. Это действительно ИИ общего назначения (AGI). Собственно, руководство DeepMind этого и не скрывало. Но вот как они планируют этого добиться, было непонятно. А теперь проясняется.
Стратегическая логика здесь такова.
1) AGI должен быть воплощенным.
Значит полагаться только на алгоритмы настольных и компьютерных игр (всякие там AlphaGo, Alphazero … ) нет смысла.
2) Значит речь о роботах, материализованных и действующих в физическом мире.
3) Первейший ключевой навык для робота – движение (сенсорно-моторные навыки, направленные на достижения цели). И главный фокус здесь в том, чтобы для обучения движению роботу не требовалось море данных, как это принято у алгоритмов типа Alphazero. Надо чтобы робот попробовал некое разумное число раз, - и научился.
4) Но движение бывает разное. Для муравья, воробья и карася – это совсем не одно и то же (разные среды). Более того: для сухопутных паука, червяка и барсука– это тоже совсем не одно и то же (разные способы и механизмы движения).
Значит нужно, чтобы робот мог самостоятельно учиться УНИВЕРСАЛЬНОМУ движению.
5) Что потом? Да понятно что. Ведь из примитивов универсального движения, возможно, и складывается механизм мышления. И значит, второе может быть получено на основе первого.
К реализации п. 3 DeepMind приступил 2 года назад, создав новую парадигму обучения — Scheduled Auxiliary Control или SAC-X (запланированное вспомогательное управление). Подробней см. здесь.
Парадигма SAC-X основана на идее, что для выполнения сложных задач ИИ должен сначала научиться исследовать доступную зону и овладеть набором базовых навыков.
С реализацией п. 4 связана опубликованная на днях работа «Towards General and Autonomous Learning of Core Skills: A Case Study in Locomotion». В ней на основе SAC-X предложено универсальное решение управления моторикой непосредственно из исходных сенсорных входов. DeepMind разработал систему обучения, которая может учиться сложному поведению локомоции для широкого спектра N-ногих роботов, таких как двуногие, трехногие, четвероногие, шестиногие … включая колесные варианты (см. приложенное видео)
DeepMind сделал это, не изменив функции вознаграждения для разных роботов. Их подход позволяет научиться управлять новыми роботами всего за пару часов. Суть подхода в том, что он многозадачен: эффективнее пытаться учиться сразу нескольким навыкам, а не учиться им последовательно.
Если новый подход DeepMind взлетит, - это будет революция в мире роботов.
Ну а дальше будут пытаться реализовать п.5.
Благо зацепки, как из примитивов универсального движения эволюционно получить примитивы мышления уже есть. И хотя это было пока что сделано только для дельфинов (для их локомоции в водной среде), но и с универсальным движением может получиться.
И тогда случится революция AGI.
#Роботы #AGI
YouTube
Towards General and Autonomous Learning of Locomotion Skills
Проект имени предводителя всех медиумов планеты позволит людям преодолеть «зловещую долину».
Сегодня во WEEKEND VIDEO новый ролик о реалистичном роботе-гуманоиде Ameca компании Engineered Arts, который уже довел до кипения споры экспертов вокруг этого проекта.
• Его сторонники восхищаются тем, что Ameca теперь не только очень похоже имитирует мимику, жесты и даже «кокетство» людей, но первым среди роботов-гуманоидов, обрел «чувство собственного пространства». Совсем недавно об имитации подобных «чувств» у роботов не было и речи. Они лишь, подобно Софии (Sophia) бесстрастно вещали человеческим голосом, не вызывая у видящих их людей ничего, кроме снисходительной улыбки. Ameca же, как признаются его разработчики, уже начинает своей реалистичностью их самих пугать… Эта имитация действует уже на уровне подсознания людей.
• Противники же проекта продолжают настаивать на его, якобы, бессмысленности. Мол, кому и зачем нужны такие человекоподобный роботы, кроме как с понтом народ удивлять на выставках и шоу?
Но все не так просто, ибо у Engineered Arts есть сверхзадача, о которой они пока публично не говорят (но есть шанс, что объявят в январе на CES 2022).
Дело в том, что компания намерена совершить прорыв в робототехнике – найти способ обхода «зловещей долины».
Согласно гипотезы "зловещей долины" японского робототехника Масахиро Мори, робот-гуманоид, выглядящий и действующий почти как человек, вызывает отвращение у людей.
Казалось бы, чем больше робот похож на человека, тем симпатичнее он должен казаться людям. Но оказывается, что так происходит до определенной границы, за которой провал в симпатиях людей - "зловещая долина" с зомби, трупами и отвращением к протезам частей человеческого тела. То есть гуманоид, выглядящий почти как человек, но подсознательно воспринимаемый не человеком, нас пугает.
Как заставить наше подсознание не пугаться "зловещей долины" - задача на много миллиардов. Уже через несколько лет роботы начнут заменять людей в деятельности, проходящей среди людей (а не только на заводах и складах, как сегодня). И вот тут-то и понадобиться умение сделать таких гуманоидных роботов, чтобы они вызывали у людей не испуг, не отвращение и даже не равнодушие. Нужно, чтобы они на подсознательном уровне вызывали расположение людей.
Для решения этой задачи в Engineered Arts уже несколько лет ведется зонтичный проект Месмер (видео), от которого отпочковался фронт-проект Ameca. Оба проекта работают на решение сдвоенной вышеназванной сверхзадачи: кожа, волосы, глаза, рот проекта Mesmer, а также мимика и движения проекта Ameca – все в комплексе должно подсознательно вызывать у людей расположение, позволяющее преодолеть "зловещую долину".
В заключение, почему проект назван Месмер.
• Франц Антон Месмер (Mesmer 1734-1815) — австрийский врач, создатель учения животного магнетизма («месмеризм»). Согласно Месмеру, люди выделяют особого рода энергию (флюиды), которые позволяют им устанавливать телепатическую связь друг с другом.
• В романе Пелевина «Смотритель» (процитирую Г. Юзефович) «предводитель всех медиумов планеты Франц-Антон Месмер — силою мысли сумели надуть огромный ментальный пузырь, то есть визуализировать, а после расширить и обжить целый новый мир (Идиллиум), основанный на так называемом Флюиде — особом веществе, связывающем дух и материю, а по проявлениям очень похожем на джедайскую Силу».
Однако, как показано в романе Пелевина, Идиллиума не существует. Это всего лишь проекция человеческого сознания, существующая только благодаря тому, что герой романа на него смотрит.
Названием Месмер авторы проекта также дают понять, что и "зловещая долина" – лишь плод нашего сознания. И поэтому проект Месмер вовсе не про роботов-гуманоидов, а про нас.
#роботы
Сегодня во WEEKEND VIDEO новый ролик о реалистичном роботе-гуманоиде Ameca компании Engineered Arts, который уже довел до кипения споры экспертов вокруг этого проекта.
• Его сторонники восхищаются тем, что Ameca теперь не только очень похоже имитирует мимику, жесты и даже «кокетство» людей, но первым среди роботов-гуманоидов, обрел «чувство собственного пространства». Совсем недавно об имитации подобных «чувств» у роботов не было и речи. Они лишь, подобно Софии (Sophia) бесстрастно вещали человеческим голосом, не вызывая у видящих их людей ничего, кроме снисходительной улыбки. Ameca же, как признаются его разработчики, уже начинает своей реалистичностью их самих пугать… Эта имитация действует уже на уровне подсознания людей.
• Противники же проекта продолжают настаивать на его, якобы, бессмысленности. Мол, кому и зачем нужны такие человекоподобный роботы, кроме как с понтом народ удивлять на выставках и шоу?
Но все не так просто, ибо у Engineered Arts есть сверхзадача, о которой они пока публично не говорят (но есть шанс, что объявят в январе на CES 2022).
Дело в том, что компания намерена совершить прорыв в робототехнике – найти способ обхода «зловещей долины».
Согласно гипотезы "зловещей долины" японского робототехника Масахиро Мори, робот-гуманоид, выглядящий и действующий почти как человек, вызывает отвращение у людей.
Казалось бы, чем больше робот похож на человека, тем симпатичнее он должен казаться людям. Но оказывается, что так происходит до определенной границы, за которой провал в симпатиях людей - "зловещая долина" с зомби, трупами и отвращением к протезам частей человеческого тела. То есть гуманоид, выглядящий почти как человек, но подсознательно воспринимаемый не человеком, нас пугает.
Как заставить наше подсознание не пугаться "зловещей долины" - задача на много миллиардов. Уже через несколько лет роботы начнут заменять людей в деятельности, проходящей среди людей (а не только на заводах и складах, как сегодня). И вот тут-то и понадобиться умение сделать таких гуманоидных роботов, чтобы они вызывали у людей не испуг, не отвращение и даже не равнодушие. Нужно, чтобы они на подсознательном уровне вызывали расположение людей.
Для решения этой задачи в Engineered Arts уже несколько лет ведется зонтичный проект Месмер (видео), от которого отпочковался фронт-проект Ameca. Оба проекта работают на решение сдвоенной вышеназванной сверхзадачи: кожа, волосы, глаза, рот проекта Mesmer, а также мимика и движения проекта Ameca – все в комплексе должно подсознательно вызывать у людей расположение, позволяющее преодолеть "зловещую долину".
В заключение, почему проект назван Месмер.
• Франц Антон Месмер (Mesmer 1734-1815) — австрийский врач, создатель учения животного магнетизма («месмеризм»). Согласно Месмеру, люди выделяют особого рода энергию (флюиды), которые позволяют им устанавливать телепатическую связь друг с другом.
• В романе Пелевина «Смотритель» (процитирую Г. Юзефович) «предводитель всех медиумов планеты Франц-Антон Месмер — силою мысли сумели надуть огромный ментальный пузырь, то есть визуализировать, а после расширить и обжить целый новый мир (Идиллиум), основанный на так называемом Флюиде — особом веществе, связывающем дух и материю, а по проявлениям очень похожем на джедайскую Силу».
Однако, как показано в романе Пелевина, Идиллиума не существует. Это всего лишь проекция человеческого сознания, существующая только благодаря тому, что герой романа на него смотрит.
Названием Месмер авторы проекта также дают понять, что и "зловещая долина" – лишь плод нашего сознания. И поэтому проект Месмер вовсе не про роботов-гуманоидов, а про нас.
#роботы
YouTube
Ameca Interaction
Interacting with #ameca humanoid robot. Images from the eye cams are processed using #tensorflow
Ameca reacts as things enter their 'personal space'. This is even starting to freak us out at Engineered Arts and we are used to it!
Ameca reacts as things enter their 'personal space'. This is even starting to freak us out at Engineered Arts and we are used to it!
Бегающими, прыгающими и танцующими роботами уже мало кого удивишь. Но вот чтоб роботу были доступны любые аллюры - от галопа и рыси до тёльта и пасо фино, - это что-то новое.
Но это только присказка циклических движений.
А сказка впереди – умение робота выполнять ациклические движения, требующие уникальной координации всех конечностей и тела.
Вот пример в стиле Джеки Чана - удар в прыжке пяткой в ухо противника (первые 5 сек видео).
А дальше еще на 4 мин WEEKEND VIDEO робот-лошарик бегает разными аллюрами.
https://www.youtube.com/watch?v=dS_HUq1-pQY
А вот как этого добились https://arxiv.org/pdf/2201.07601.pdf
#Роботы
Но это только присказка циклических движений.
А сказка впереди – умение робота выполнять ациклические движения, требующие уникальной координации всех конечностей и тела.
Вот пример в стиле Джеки Чана - удар в прыжке пяткой в ухо противника (первые 5 сек видео).
А дальше еще на 4 мин WEEKEND VIDEO робот-лошарик бегает разными аллюрами.
https://www.youtube.com/watch?v=dS_HUq1-pQY
А вот как этого добились https://arxiv.org/pdf/2201.07601.pdf
#Роботы
YouTube
BiConMP: A Nonlinear Model Predictive Control Framework for Whole Body Motion Planning
Online planning of whole-body motions for legged robots is challenging due to the inherent nonlinearity in the robot dynamics. In this work https://arxiv.org/pdf/2201.07601.pdf , we propose a nonlinear MPC framework, the BiConMP which can generate whole…
Создан первый частично самоосознающий себя робот.
Прорыв в понимании важной части модели мира – модели самого себя.
Пока Илон Маск пиарится на дутой разработке «дружелюбного» человекоподобного робота с ИИ (это чистая разводка для хайпа), в мире ИИ происходит воистину тектонический сдвиг. Создан первый в мире робот не с абстрактным ИИ, а с самоосознающим ИИ.
Это значит следующее:
• робот, интеллект которого изначально не имеет никакой модели самого себя (точнее, действий своего тела в окружающем пространстве), может самостоятельно построить эту модель;
• он делает это без помощи людей, а лишь наблюдая за своими движениями, в ходе обретения им практического опыта;
• используя полученную модель самого себя, робот может предельно точно действовать в окружающем мире;
• при повреждении своего тела (типа ногу сломал, руку оторвало и т.д.) робот, подобно животным и людям, сам адаптируется к новой ситуации, реконструировав свои программы движений;
• а если, например, завтра после включения робота, он узнает, что у него теперь не одна рука, а семь, он также сам адаптируется к новой ситуации, реконструировав свои программы движений в стиле осьминога.
Принципиальный прорыв совершён за счет сочетания 2х прорывных моментов:
✔️люди не закладывают в робота знание того:
• как устроено его тело,
• какова кинематика движений его подвижных частей,
• каковы способы их сочленения - углы, амплитуды и траектории движений частей
✔️ вместо этого, глубокую нейронную сеть научили определять положение частей своего тела в окружающем пространстве:
• поместили роборуку (рука пока одна, но это дело наживное) в круг из пяти видеокамер, транслирующих в нейронную сеть прямую трансляцию о движениях роборуки,
• в ходе движений роборука наблюдает за собой через камеры, а её внутренняя сеть определяет положение суставов по отношению к объему, занимаемому роборукой в окружающей среде.
Через три часа нейросеть робруки построила полную визуальную модель самой себя и своих движений.
Эта собственная модель позволяет роботу планировать действия и избегать препятствий, поскольку он знает, будет ли место в пространстве занято, если его суставы сместятся под определенными углами, а части сдвинутся по такой траектории с определенной амплитудой.
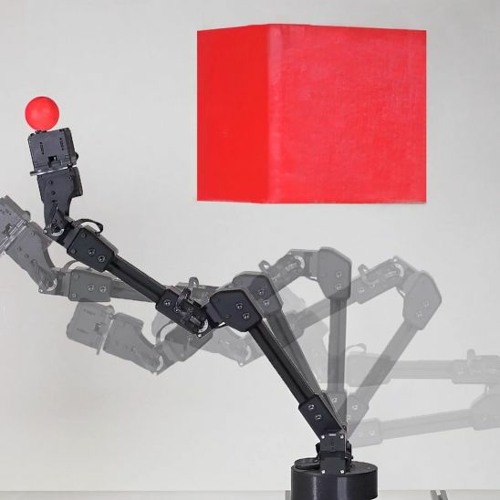
Тестовая задача была коснуться мяча любой частью тела. Планирование движения, созданное на основе собственной модели, достигло 97% успеха при выполнении поставленных задач и является таким же точным, как и реальное выполнение.
Значимость этой работы выходит далеко за пределы робототехники по двум причинам.
1. Это первый робот, управляющий своим движением подобно мозгу.
Модель мозга строится с использованием картографических систем отсчета. Системы отсчета сообщают нам, где вещи (и где мы сами) расположены относительно друг друга, и позволяют нам двигаться, планировать и достигать целей.
2. Модель управления движением может оказаться универсальной моделью познавательных способностей, позволяющей понять, как в материальном мозге рождается нематериальные сознание и мышление.
Согласно «гипотезе интеллекта и воплощения» (intelligence and embodiment hypothesis — см. мой пост), познавательная способность разума, реализуемая механизмом мышления, возникла в результате переадаптации системы управления движением в ходе миллионов лет экспериментов «самоделкина» — эволюции. Т.е. с эволюционной точки зрения обширный нейронный механизм, разработанный для контроля движения животных, был расширен, чтобы контролировать новые структуры мозга вместо мышц.
Идя этим путем, возможно, удастся понять, описать и повторить не только уникальную моторику людей (в роботах), но и уникальные познавательные способности разума людей (в искусственном интеллекте).
#ВоплощенныйИнтеллект #Разум #Движение #Роботы
PS Самоосознание своего тела – лишь малая (но важная) часть самоосознания.
PSS Новость поста столь горячая, что я пустил ее вместо 2й части лонгрида «У землян всего два варианта будущего» – 2я часть на подходе ))
Прорыв в понимании важной части модели мира – модели самого себя.
Пока Илон Маск пиарится на дутой разработке «дружелюбного» человекоподобного робота с ИИ (это чистая разводка для хайпа), в мире ИИ происходит воистину тектонический сдвиг. Создан первый в мире робот не с абстрактным ИИ, а с самоосознающим ИИ.
Это значит следующее:
• робот, интеллект которого изначально не имеет никакой модели самого себя (точнее, действий своего тела в окружающем пространстве), может самостоятельно построить эту модель;
• он делает это без помощи людей, а лишь наблюдая за своими движениями, в ходе обретения им практического опыта;
• используя полученную модель самого себя, робот может предельно точно действовать в окружающем мире;
• при повреждении своего тела (типа ногу сломал, руку оторвало и т.д.) робот, подобно животным и людям, сам адаптируется к новой ситуации, реконструировав свои программы движений;
• а если, например, завтра после включения робота, он узнает, что у него теперь не одна рука, а семь, он также сам адаптируется к новой ситуации, реконструировав свои программы движений в стиле осьминога.
Принципиальный прорыв совершён за счет сочетания 2х прорывных моментов:
✔️люди не закладывают в робота знание того:
• как устроено его тело,
• какова кинематика движений его подвижных частей,
• каковы способы их сочленения - углы, амплитуды и траектории движений частей
✔️ вместо этого, глубокую нейронную сеть научили определять положение частей своего тела в окружающем пространстве:
• поместили роборуку (рука пока одна, но это дело наживное) в круг из пяти видеокамер, транслирующих в нейронную сеть прямую трансляцию о движениях роборуки,
• в ходе движений роборука наблюдает за собой через камеры, а её внутренняя сеть определяет положение суставов по отношению к объему, занимаемому роборукой в окружающей среде.
Через три часа нейросеть робруки построила полную визуальную модель самой себя и своих движений.
Эта собственная модель позволяет роботу планировать действия и избегать препятствий, поскольку он знает, будет ли место в пространстве занято, если его суставы сместятся под определенными углами, а части сдвинутся по такой траектории с определенной амплитудой.
Тестовая задача была коснуться мяча любой частью тела. Планирование движения, созданное на основе собственной модели, достигло 97% успеха при выполнении поставленных задач и является таким же точным, как и реальное выполнение.
Значимость этой работы выходит далеко за пределы робототехники по двум причинам.
1. Это первый робот, управляющий своим движением подобно мозгу.
Модель мозга строится с использованием картографических систем отсчета. Системы отсчета сообщают нам, где вещи (и где мы сами) расположены относительно друг друга, и позволяют нам двигаться, планировать и достигать целей.
2. Модель управления движением может оказаться универсальной моделью познавательных способностей, позволяющей понять, как в материальном мозге рождается нематериальные сознание и мышление.
Согласно «гипотезе интеллекта и воплощения» (intelligence and embodiment hypothesis — см. мой пост), познавательная способность разума, реализуемая механизмом мышления, возникла в результате переадаптации системы управления движением в ходе миллионов лет экспериментов «самоделкина» — эволюции. Т.е. с эволюционной точки зрения обширный нейронный механизм, разработанный для контроля движения животных, был расширен, чтобы контролировать новые структуры мозга вместо мышц.
Идя этим путем, возможно, удастся понять, описать и повторить не только уникальную моторику людей (в роботах), но и уникальные познавательные способности разума людей (в искусственном интеллекте).
#ВоплощенныйИнтеллект #Разум #Движение #Роботы
PS Самоосознание своего тела – лишь малая (но важная) часть самоосознания.
PSS Новость поста столь горячая, что я пустил ее вместо 2й части лонгрида «У землян всего два варианта будущего» – 2я часть на подходе ))
{kind=link}
Робототехника дала альтернативный сценарий развития Homo.
Можно было очеловечиться, не потеряв способность быстро бегать.
Такая возможность была продемонстрирована на прошлой неделе на Международной конференции по интеллектуальным роботам IROS 2022 в Японии.
Казалось бы, где роботы и где эволюция Homo. Но дело вот в чём.
Сценарии эволюции видов, скорее всего, неповторимы. И если люди таки угробят свой вид, то новый носитель высшего интеллекта вряд ли эволюционирует по пути гоминид. Каким может быть альтернативный путь, до последнего времени, был исключительно вопросом фантастов. Но с развитием робототехники, кое-что стало проясняться.
И вот появился первый замечательный пример – как животное может эволюционировать из четвероногого в двуногое, не потеряв при этом в скорости бега.
Тренированные люди могут бежать со скоростью 15-20 км/ч. Это вдвое медленнее коровы, вчетверо – тигра и всемеро – гепарда.
Такова плата за двуногость, запустившую процесс «очеловечивания» наших предков. Из совокупности 3-х признаков, характерных только для людей (двуногость, хватательная кисть и объемный, высокоразвитый мозг), двуногость эволюционно развилась первой, что сыграло ключевую роль для всей последующей истории гоминид.
Двуногость освободила руки, без чего не было бы сложных орудий и вообще нашей культуры. Но за это пришлось дорого заплатить трудностями при вынашивании плода и при родах, нарушением в кровообращении, пищеварении и самым очевидным преимуществом – скоростью бега (столь важной для выживания).
А можно ли обрести двуногость, сохранив преимущество быстрого бега на 4-х?
На IROS 2022 исследователи из WPI Robotics Engineering и Шанхайского технологического университета представили обобщенный метод превращения 4-хногого робота в двуногого с помощью умного алгоритма и небольшой модификации.
Если бы эволюция развила у наших предков отросток на голени задних конечностей, это обеспечило бы устойчивость при ходьбе на 2-х, сохранив способность к быстрому бегу на 4-х. Конечно, потребовалась бы еще «перепрошивка» двигательных программ мозга иным алгоритмом обучения. Но подобное перепрограммирование эволюцией освоено в совершенстве.
Результат такого альтернативного сценария эволюции двуногости у робота разработки WPI Robotics Engineering и Шанхайского технологического университета можно увидеть на этом видео.
Это видео не столь эмоционально потрясает, как фрагмент знаменитого фильма «2001: Космическая одиссея», где «Черный монолит» заработал, запустив процесс антропогенеза под музыку Рихарда Штрауса «Так говорил Заратустра» (подробней о том, что это было, см. в моём посте).
Однако, по сути, это видео вставшего и пошедшего на двух ногах робота не менее потрясающе.
Не тем, что 4-х ногий робот пошел на 2-х. Такое уже делали на специально разработанных роботах. Здесь же мы видим универсальное простое решение, подходящее для трансформации любых (!) четвероногих в мультимодальных (ходящих на 2-х и бегающих на 4-х). И тем самым, мы наглядно видим, как эволюция предков людей могла запросто пойти по иному сценарию.
Ну а то, насколько искусно эволюция умеет делать подобные вещи, мы знаем на реальных примерах. Чего стоит «двойная эволюция» китообразных: сначала сотни миллионов лет приспособления к сухопутной среде, а потом еще полсотни миллионов – к водной (с полной перестройкой тела и тотальной “перепрошивкой” мозга сухопутных китопарнокопытных). И уж если с превращением лап в плавники у эволюции проблем не было, то уж с костным отростком на голени она справилась бы запросто. А смена алгоритма обучения на бимодальный, как показал эксперимент с роботом, оказалась весьма несложной и продуктивной.
И бегали бы люди по улицам городов с ограниченной правилами скоростью. А распространенность легковых авто была бы, как сейчас у частных самолетов – тысяч 20 на весь мир.
#Эволюция #Роботы
Можно было очеловечиться, не потеряв способность быстро бегать.
Такая возможность была продемонстрирована на прошлой неделе на Международной конференции по интеллектуальным роботам IROS 2022 в Японии.
Казалось бы, где роботы и где эволюция Homo. Но дело вот в чём.
Сценарии эволюции видов, скорее всего, неповторимы. И если люди таки угробят свой вид, то новый носитель высшего интеллекта вряд ли эволюционирует по пути гоминид. Каким может быть альтернативный путь, до последнего времени, был исключительно вопросом фантастов. Но с развитием робототехники, кое-что стало проясняться.
И вот появился первый замечательный пример – как животное может эволюционировать из четвероногого в двуногое, не потеряв при этом в скорости бега.
Тренированные люди могут бежать со скоростью 15-20 км/ч. Это вдвое медленнее коровы, вчетверо – тигра и всемеро – гепарда.
Такова плата за двуногость, запустившую процесс «очеловечивания» наших предков. Из совокупности 3-х признаков, характерных только для людей (двуногость, хватательная кисть и объемный, высокоразвитый мозг), двуногость эволюционно развилась первой, что сыграло ключевую роль для всей последующей истории гоминид.
Двуногость освободила руки, без чего не было бы сложных орудий и вообще нашей культуры. Но за это пришлось дорого заплатить трудностями при вынашивании плода и при родах, нарушением в кровообращении, пищеварении и самым очевидным преимуществом – скоростью бега (столь важной для выживания).
А можно ли обрести двуногость, сохранив преимущество быстрого бега на 4-х?
На IROS 2022 исследователи из WPI Robotics Engineering и Шанхайского технологического университета представили обобщенный метод превращения 4-хногого робота в двуногого с помощью умного алгоритма и небольшой модификации.
Если бы эволюция развила у наших предков отросток на голени задних конечностей, это обеспечило бы устойчивость при ходьбе на 2-х, сохранив способность к быстрому бегу на 4-х. Конечно, потребовалась бы еще «перепрошивка» двигательных программ мозга иным алгоритмом обучения. Но подобное перепрограммирование эволюцией освоено в совершенстве.
Результат такого альтернативного сценария эволюции двуногости у робота разработки WPI Robotics Engineering и Шанхайского технологического университета можно увидеть на этом видео.
Это видео не столь эмоционально потрясает, как фрагмент знаменитого фильма «2001: Космическая одиссея», где «Черный монолит» заработал, запустив процесс антропогенеза под музыку Рихарда Штрауса «Так говорил Заратустра» (подробней о том, что это было, см. в моём посте).
Однако, по сути, это видео вставшего и пошедшего на двух ногах робота не менее потрясающе.
Не тем, что 4-х ногий робот пошел на 2-х. Такое уже делали на специально разработанных роботах. Здесь же мы видим универсальное простое решение, подходящее для трансформации любых (!) четвероногих в мультимодальных (ходящих на 2-х и бегающих на 4-х). И тем самым, мы наглядно видим, как эволюция предков людей могла запросто пойти по иному сценарию.
Ну а то, насколько искусно эволюция умеет делать подобные вещи, мы знаем на реальных примерах. Чего стоит «двойная эволюция» китообразных: сначала сотни миллионов лет приспособления к сухопутной среде, а потом еще полсотни миллионов – к водной (с полной перестройкой тела и тотальной “перепрошивкой” мозга сухопутных китопарнокопытных). И уж если с превращением лап в плавники у эволюции проблем не было, то уж с костным отростком на голени она справилась бы запросто. А смена алгоритма обучения на бимодальный, как показал эксперимент с роботом, оказалась весьма несложной и продуктивной.
И бегали бы люди по улицам городов с ограниченной правилами скоростью. А распространенность легковых авто была бы, как сейчас у частных самолетов – тысяч 20 на весь мир.
#Эволюция #Роботы
YouTube
Multi-Modal Legged Locomotion Framework with Automated Residual Reinforcement Learning
This is the supplementary video of paper Multi-Modal Legged Locomotion Framework with Automated Residual Reinforcement Learning (Hybrid Residual Reinforcement Learning on a Multi-Modal Legged Robot), under review as a conference paper at IROS 2022 (https…