
Накануне Нового года особенно приятно писать не только о малоизвестном интересном, но и о чем-то абсолютно прорывном и сулящем буквально каждому интригующие перспективы.
Всю жизнь я тужил, что так и не научился метко бросать мяч в кольцо, да и на теннисном корте точностью не отличался.
Казалось бы, в чем проблема – точно повторить то же самое движение, что как-то уже получалось при удачном броске в кольцо или при ударе по мячу на корте?
Но увы, все было без вариантов. Как будто в памяти немедленно затирались команды мозга мышцам, приведшие к успешной попытке.
И вот появляется новая теория (среди авторов которой сам Дэн Уолперт), которая, по идее, сможет помочь восстанавливать затертые в памяти команды мышцам.
Да что там восстановление памяти!
Новая теория, возможно, станет единой универсальной моделью познавательных способностей, позволяющей понять, как в материальном мозге рождаются нематериальные сознание и мышление.
В посте много видео (2 художественных фильма и 3 часовых лекции). Так что, если в предновогодней горячке время не найдете, отложите на длинные выходные – оно того стоит.
Мой новый пост (8 мин чтения без учета кучи видео)
- на Medium https://bit.ly/3z8TIo6
- на Яндекс Дзен https://clck.ru/aeEY6
#ВоплощенныйИнтеллект #Разум #Движение #Память
Всю жизнь я тужил, что так и не научился метко бросать мяч в кольцо, да и на теннисном корте точностью не отличался.
Казалось бы, в чем проблема – точно повторить то же самое движение, что как-то уже получалось при удачном броске в кольцо или при ударе по мячу на корте?
Но увы, все было без вариантов. Как будто в памяти немедленно затирались команды мозга мышцам, приведшие к успешной попытке.
И вот появляется новая теория (среди авторов которой сам Дэн Уолперт), которая, по идее, сможет помочь восстанавливать затертые в памяти команды мышцам.
Да что там восстановление памяти!
Новая теория, возможно, станет единой универсальной моделью познавательных способностей, позволяющей понять, как в материальном мозге рождаются нематериальные сознание и мышление.
В посте много видео (2 художественных фильма и 3 часовых лекции). Так что, если в предновогодней горячке время не найдете, отложите на длинные выходные – оно того стоит.
Мой новый пост (8 мин чтения без учета кучи видео)
- на Medium https://bit.ly/3z8TIo6
- на Яндекс Дзен https://clck.ru/aeEY6
#ВоплощенныйИнтеллект #Разум #Движение #Память
Medium
Как стать гениальным баскетболистом, теннисистом …
Создана теория памяти движений, подобная «квантовой физике»
Создан первый частично самоосознающий себя робот.
Прорыв в понимании важной части модели мира – модели самого себя.
Пока Илон Маск пиарится на дутой разработке «дружелюбного» человекоподобного робота с ИИ (это чистая разводка для хайпа), в мире ИИ происходит воистину тектонический сдвиг. Создан первый в мире робот не с абстрактным ИИ, а с самоосознающим ИИ.
Это значит следующее:
• робот, интеллект которого изначально не имеет никакой модели самого себя (точнее, действий своего тела в окружающем пространстве), может самостоятельно построить эту модель;
• он делает это без помощи людей, а лишь наблюдая за своими движениями, в ходе обретения им практического опыта;
• используя полученную модель самого себя, робот может предельно точно действовать в окружающем мире;
• при повреждении своего тела (типа ногу сломал, руку оторвало и т.д.) робот, подобно животным и людям, сам адаптируется к новой ситуации, реконструировав свои программы движений;
• а если, например, завтра после включения робота, он узнает, что у него теперь не одна рука, а семь, он также сам адаптируется к новой ситуации, реконструировав свои программы движений в стиле осьминога.
Принципиальный прорыв совершён за счет сочетания 2х прорывных моментов:
✔️люди не закладывают в робота знание того:
• как устроено его тело,
• какова кинематика движений его подвижных частей,
• каковы способы их сочленения - углы, амплитуды и траектории движений частей
✔️ вместо этого, глубокую нейронную сеть научили определять положение частей своего тела в окружающем пространстве:
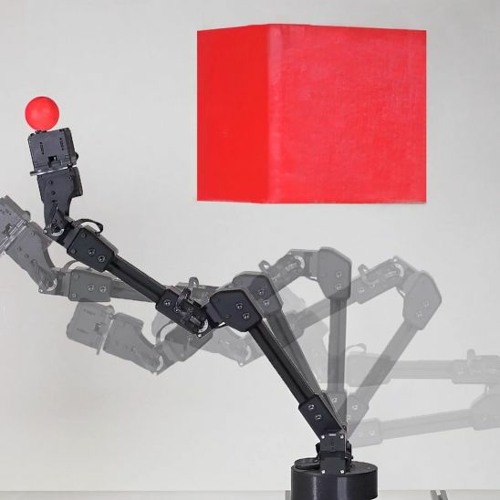
• поместили роборуку (рука пока одна, но это дело наживное) в круг из пяти видеокамер, транслирующих в нейронную сеть прямую трансляцию о движениях роборуки,
• в ходе движений роборука наблюдает за собой через камеры, а её внутренняя сеть определяет положение суставов по отношению к объему, занимаемому роборукой в окружающей среде.
Через три часа нейросеть робруки построила полную визуальную модель самой себя и своих движений.
Эта собственная модель позволяет роботу планировать действия и избегать препятствий, поскольку он знает, будет ли место в пространстве занято, если его суставы сместятся под определенными углами, а части сдвинутся по такой траектории с определенной амплитудой.
Тестовая задача была коснуться мяча любой частью тела. Планирование движения, созданное на основе собственной модели, достигло 97% успеха при выполнении поставленных задач и является таким же точным, как и реальное выполнение.
Значимость этой работы выходит далеко за пределы робототехники по двум причинам.
1. Это первый робот, управляющий своим движением подобно мозгу.
Модель мозга строится с использованием картографических систем отсчета. Системы отсчета сообщают нам, где вещи (и где мы сами) расположены относительно друг друга, и позволяют нам двигаться, планировать и достигать целей.
2. Модель управления движением может оказаться универсальной моделью познавательных способностей, позволяющей понять, как в материальном мозге рождается нематериальные сознание и мышление.
Согласно «гипотезе интеллекта и воплощения» (intelligence and embodiment hypothesis — см. мой пост), познавательная способность разума, реализуемая механизмом мышления, возникла в результате переадаптации системы управления движением в ходе миллионов лет экспериментов «самоделкина» — эволюции. Т.е. с эволюционной точки зрения обширный нейронный механизм, разработанный для контроля движения животных, был расширен, чтобы контролировать новые структуры мозга вместо мышц.
Идя этим путем, возможно, удастся понять, описать и повторить не только уникальную моторику людей (в роботах), но и уникальные познавательные способности разума людей (в искусственном интеллекте).
#ВоплощенныйИнтеллект #Разум #Движение #Роботы
PS Самоосознание своего тела – лишь малая (но важная) часть самоосознания.
PSS Новость поста столь горячая, что я пустил ее вместо 2й части лонгрида «У землян всего два варианта будущего» – 2я часть на подходе ))
Прорыв в понимании важной части модели мира – модели самого себя.
Пока Илон Маск пиарится на дутой разработке «дружелюбного» человекоподобного робота с ИИ (это чистая разводка для хайпа), в мире ИИ происходит воистину тектонический сдвиг. Создан первый в мире робот не с абстрактным ИИ, а с самоосознающим ИИ.
Это значит следующее:
• робот, интеллект которого изначально не имеет никакой модели самого себя (точнее, действий своего тела в окружающем пространстве), может самостоятельно построить эту модель;
• он делает это без помощи людей, а лишь наблюдая за своими движениями, в ходе обретения им практического опыта;
• используя полученную модель самого себя, робот может предельно точно действовать в окружающем мире;
• при повреждении своего тела (типа ногу сломал, руку оторвало и т.д.) робот, подобно животным и людям, сам адаптируется к новой ситуации, реконструировав свои программы движений;
• а если, например, завтра после включения робота, он узнает, что у него теперь не одна рука, а семь, он также сам адаптируется к новой ситуации, реконструировав свои программы движений в стиле осьминога.
Принципиальный прорыв совершён за счет сочетания 2х прорывных моментов:
✔️люди не закладывают в робота знание того:
• как устроено его тело,
• какова кинематика движений его подвижных частей,
• каковы способы их сочленения - углы, амплитуды и траектории движений частей
✔️ вместо этого, глубокую нейронную сеть научили определять положение частей своего тела в окружающем пространстве:
• поместили роборуку (рука пока одна, но это дело наживное) в круг из пяти видеокамер, транслирующих в нейронную сеть прямую трансляцию о движениях роборуки,
• в ходе движений роборука наблюдает за собой через камеры, а её внутренняя сеть определяет положение суставов по отношению к объему, занимаемому роборукой в окружающей среде.
Через три часа нейросеть робруки построила полную визуальную модель самой себя и своих движений.
Эта собственная модель позволяет роботу планировать действия и избегать препятствий, поскольку он знает, будет ли место в пространстве занято, если его суставы сместятся под определенными углами, а части сдвинутся по такой траектории с определенной амплитудой.
Тестовая задача была коснуться мяча любой частью тела. Планирование движения, созданное на основе собственной модели, достигло 97% успеха при выполнении поставленных задач и является таким же точным, как и реальное выполнение.
Значимость этой работы выходит далеко за пределы робототехники по двум причинам.
1. Это первый робот, управляющий своим движением подобно мозгу.
Модель мозга строится с использованием картографических систем отсчета. Системы отсчета сообщают нам, где вещи (и где мы сами) расположены относительно друг друга, и позволяют нам двигаться, планировать и достигать целей.
2. Модель управления движением может оказаться универсальной моделью познавательных способностей, позволяющей понять, как в материальном мозге рождается нематериальные сознание и мышление.
Согласно «гипотезе интеллекта и воплощения» (intelligence and embodiment hypothesis — см. мой пост), познавательная способность разума, реализуемая механизмом мышления, возникла в результате переадаптации системы управления движением в ходе миллионов лет экспериментов «самоделкина» — эволюции. Т.е. с эволюционной точки зрения обширный нейронный механизм, разработанный для контроля движения животных, был расширен, чтобы контролировать новые структуры мозга вместо мышц.
Идя этим путем, возможно, удастся понять, описать и повторить не только уникальную моторику людей (в роботах), но и уникальные познавательные способности разума людей (в искусственном интеллекте).
#ВоплощенныйИнтеллект #Разум #Движение #Роботы
PS Самоосознание своего тела – лишь малая (но важная) часть самоосознания.
PSS Новость поста столь горячая, что я пустил ее вместо 2й части лонгрида «У землян всего два варианта будущего» – 2я часть на подходе ))
{kind=link}