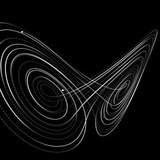
Примеры векторных полей в окрестности положений равновесия нелинейных систем.
Методы классической механики и теории динамических систем
Homework_4.pdf
В задаче 1 этого домашнего задания указание сформулировано неверно. Для доказательства устойчивости положения равновесия стоит взять функцию Ляпунова указанную на этой картинке. Здесь первое слагаемое соответствует кинетической энергии движения маятника в вертикальной плоскости, второе — потенциальной энергии силы тяжести, а третье — кинетической энергии вращения маятника вокруг вертикали, взятой с обратным знаком. Для доказательства того, что эта функция больше нуля в малой проколотой окрестности положения равновесия, необходимо разложить ее в ряд, оставив только слагаемые второго порядка.
Извините, если кто-то долго страдал из-за этой задачи.
Извините, если кто-то долго страдал из-за этой задачи.
Homework_6.pdf
125.1 KB
Высылаю домашнее задание по шестой лекции. Дедлайн - вечер следующего вторника (21 октября). Задания можно высылать на почту sakharov.av@phystech.edu или сдавать по вторникам после лекции.
Методы классической механики и теории динамических систем
Homework_6.pdf
С задачей 2 все плохо. И указание к задаче не в тему. Для анализа стоит вспомнить, что тип положения равновесия определяется детерминантом и следом матрицы Якоби. Их формулы приведены на первом рисунке. Получается, что детерминант всегда положительный, то есть седло исключается. Устойчивость или неустойчивость положения равновесия определяется знаком следа. Это еще удается сделать аналитически. Используя численный счет можно получить картинку, на которой цветом изображается знак следа (второй рисунок). А вот считать аналитически как соотносятся детерминант и квадрат следа деленного на четыре уже затруднительно. Численно я посчитал. Если не ошибся, то должно получиться как на третьем рисунке (черной линией выделена кривая на которой след равен нулю).
Методы классической механики и теории динамических систем
С задачей 2 все плохо. И указание к задаче не в тему. Для анализа стоит вспомнить, что тип положения равновесия определяется детерминантом и следом матрицы Якоби. Их формулы приведены на первом рисунке. Получается, что детерминант всегда положительный, то…
Думаю, все же что-то хорошее из этой задачи сделать можно, но в таком виде для аналитического исследования она мало пригодна. Еще можно оставить ее как упражнение для получения картинок на плоскости параметров задачи.
Если кто-то потратил на нее много времени, мне жаль.
Если кто-то потратил на нее много времени, мне жаль.
Методы классической механики и теории динамических систем
С задачей 2 все плохо. И указание к задаче не в тему. Для анализа стоит вспомнить, что тип положения равновесия определяется детерминантом и следом матрицы Якоби. Их формулы приведены на первом рисунке. Получается, что детерминант всегда положительный, то…