Еще две теоремы. Получаются просто как следствие.
🔥1
Теоремы Барбашина-Красовского и Красовского (здесь они объединены в одну теорему) можно посмотреть на странице 167.
https://books.mipt.ru/book/307231/kurs-analiticheskoj-mehaniki-uchebnoe-posobie.pdf
https://books.mipt.ru/book/307231/kurs-analiticheskoj-mehaniki-uchebnoe-posobie.pdf
Homework_4.pdf
128 KB
Высылаю домашнее задание по четвертой лекции. Дедлайн - вечер следующего вторника (7 октября). Задания можно высылать на почту sakharov.av@phystech.edu или сдавать по вторникам после лекции.
Homework_5.pdf
138.8 KB
Высылаю домашнее задание по пятой лекции. Дедлайн - вечер следующего вторника (14 октября). Задания можно высылать на почту sakharov.av@phystech.edu или сдавать по вторникам после лекции.
Методы классической механики и теории динамических систем
Homework_5.pdf
Касательно вчерашнего вопроса. Если тело вращается вокруг главной оси инерции, соответствующей наибольшему или наименьшему моменту инерции, а два других момента инерции равны, то его вращение будет устойчивым.
🔥2
Методы классической механики и теории динамических систем
Касательно вчерашнего вопроса. Если тело вращается вокруг главной оси инерции, соответствующей наибольшему или наименьшему моменту инерции, а два других момента инерции равны, то его вращение будет устойчивым.
А если вокруг оси, которой соответствует один из равных друг другу моментов инерции, то вращение тоже будет устойчивым. Можете проверить это самостоятельно, посмотрев на уравнения. Система в этом случае становится линейной, собственные значения легко находятся. Движение, при желании, выражается в элементарных функциях.
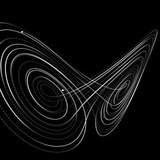
Невырожденные типа положений равновесия линейных систем на плоскости.
Примеры векторных полей в окрестности положений равновесия нелинейных систем.
Методы классической механики и теории динамических систем
Homework_4.pdf
В задаче 1 этого домашнего задания указание сформулировано неверно. Для доказательства устойчивости положения равновесия стоит взять функцию Ляпунова указанную на этой картинке. Здесь первое слагаемое соответствует кинетической энергии движения маятника в вертикальной плоскости, второе — потенциальной энергии силы тяжести, а третье — кинетической энергии вращения маятника вокруг вертикали, взятой с обратным знаком. Для доказательства того, что эта функция больше нуля в малой проколотой окрестности положения равновесия, необходимо разложить ее в ряд, оставив только слагаемые второго порядка.
Извините, если кто-то долго страдал из-за этой задачи.
Извините, если кто-то долго страдал из-за этой задачи.